8 Additional information
BU 0200 en-3118 275
I
Setpoint source and
setpoint selection
II
Signal processing
and ramp
III
Control and motor
model (determination
of slip)
Pos: 75 5 /Anlei tung en/El ektr onik/FU und Star ter/8 . Zus atzinfor mati one n/Defi nitio n Soll- und I stw ert- Verarbeitung (Frequenzen) [SK 1x0E, SK 2xxE, SK 5xxE, SK 2xxE-FDS] @ 0\ mod_1328189429815_388.docx @ 14489 @ 2 @ 1
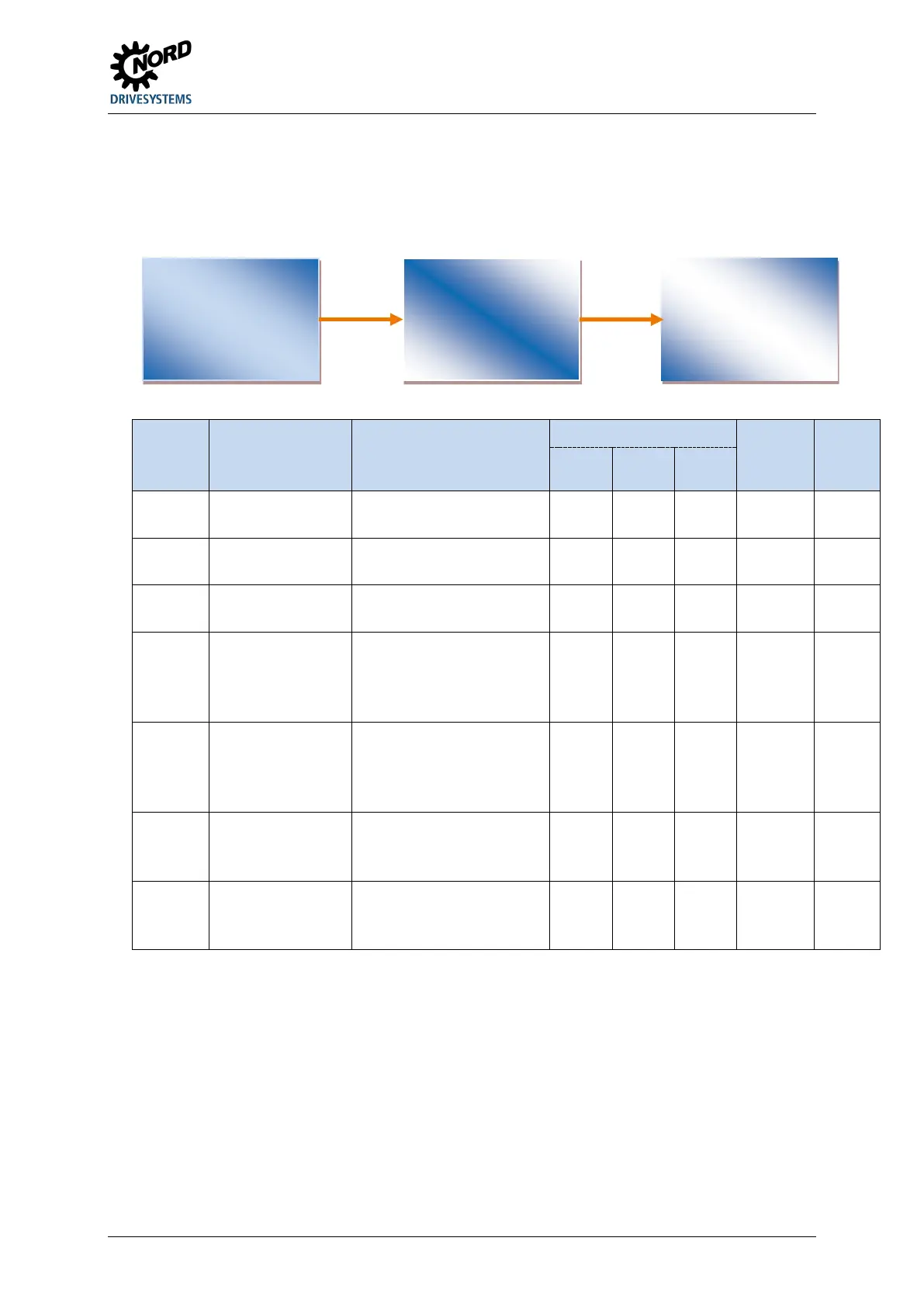
8.10 Definition of setpoint and actual value processing (frequencies)
The frequencies used in parameters (P502) and (P543) are processed in various ways according the
following table.
Function Name Meaning
Output to ... without
Right/
Left
with
Slip
I II III
8 Setpoint frequency
Setpoint
setpoint source
X
1 Actual frequency
Setpoint frequency for motor
model
X
23
with slip
Actual frequency at motor
X X
19
master value
setpoint source
Master value
(free from enable correction)
X X
20
n R master value
Setpoint frequency for motor
model
Master value
(free from enable correction)
X X
24
Master value of
actual frequency
with slip
motorMaster value
(free from enable correction)
X X X
21
Actual frequency
without slip master
value
master value slip
Master value
X
Table 18: Processing of setpoints and actual values in the frequency inverter
Pos: 75 7 /Anlei tung en/El ektr onik/FU und Star ter/9 . Wart ungs- u nd Ser vicehi nwei se/! Wartung s- und Ser vic e-Hin weise (Überschrif t) [SK 1 xxE, SK 2xxE, SK 5 xxE, SK xxxE-F DS] @ 0\mod_1328189499267_388.docx @ 14512 @ 1 @ 1
 Loading...
Loading...



