51
Example
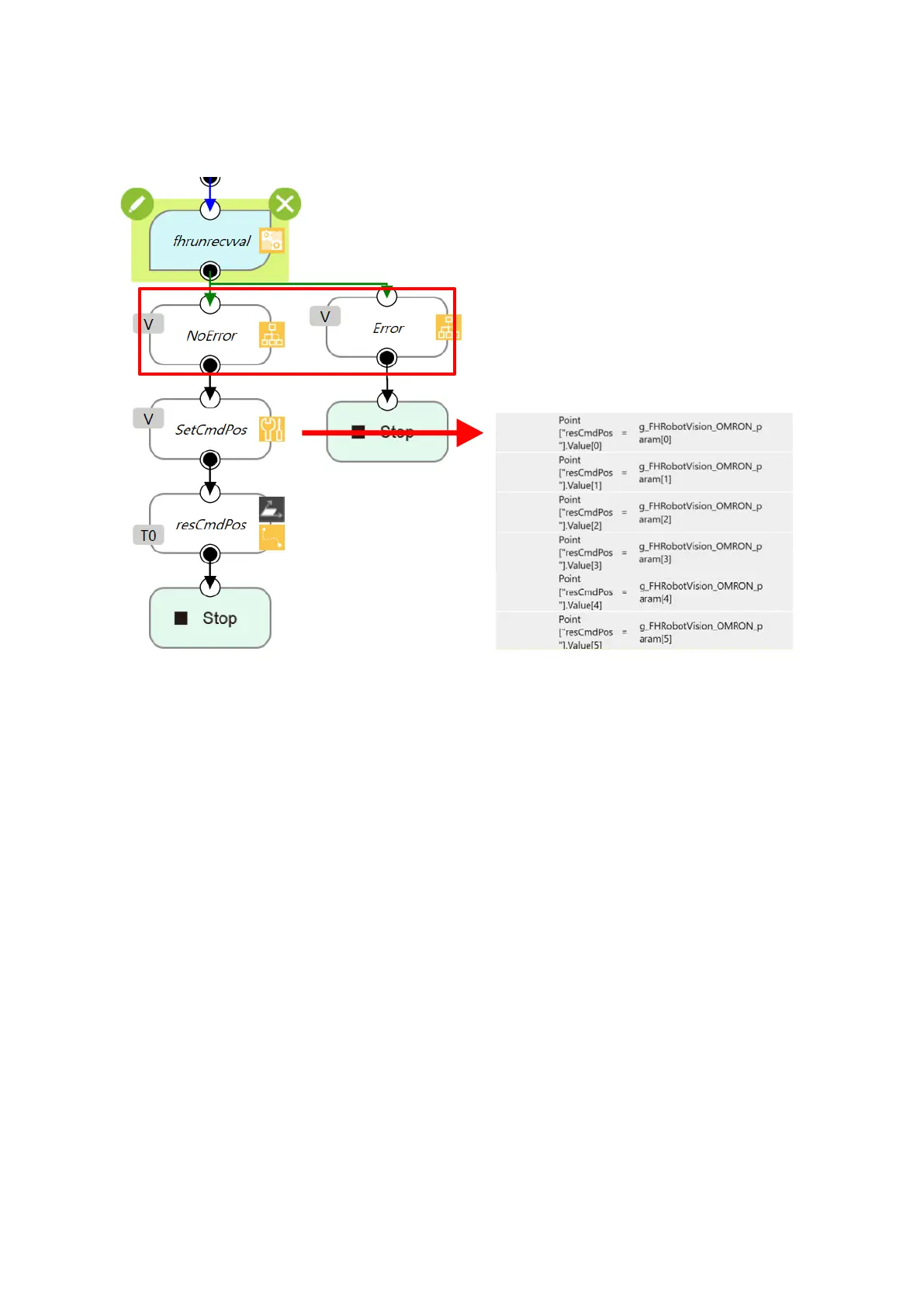
In the following example, the robot moves after receiving the measurement result of the
Vision Sensor (grasping position X, Y, Z, W, P, R).
Receive the results of the Vision Sensor measurements
Check if the error number is 0.
Store the received results in a Point
Move Robot
 Loading...
Loading...















