2-71
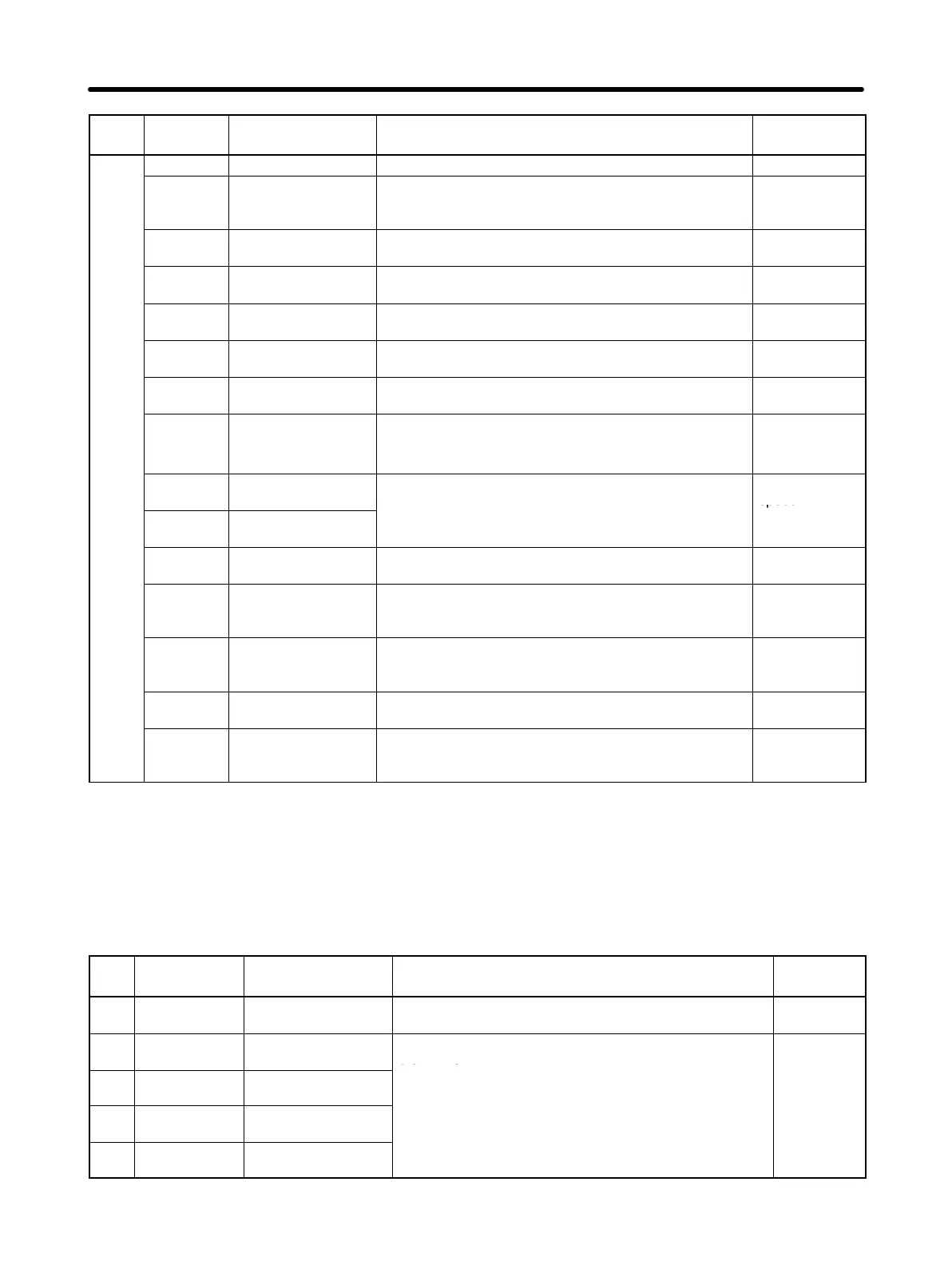
Pin
No.
Control
mode
ContentsFunctionSignal
name
40 to
RUN [40] RUN command input ON: Servo ON (Starts power to Servomotor.) All
46
MING [41] Gain reduction input ON: Switches speed loop to P control and reduces
speed gain.
Position,
speed, internal-
ly set speed
POT [42] Forward drive pro-
hibit input
Forward rotation overtravel input (OFF Prohibited; ON:
Permitted).
All
NOT [43] Reverse drive pro-
hibit input
Reverse rotation overtravel input (OFF Prohibited; ON:
Permitted).
All
RESET
[44]
Alarm reset input ON: Servo alarm status is reset. All
PCL [45] Forward rotation cur-
rent limit input
ON: Output current is limited by the value set in Pn404
(forward rotation external current limit).
All
NCL [46] Reverse rotation cur-
rent limit input
ON: Output current is limited by the value set in Pn405
(reverse rotation external current limit).
All
RDIR [41] Rotation direction
command input
Specifies the direction of rotation for Servomotor rotation
at the internally set speed.
OFF: Forward rotation, ON: Reverse rotation
Internally set
speed
SPD1 [45] Speed selection
command 1 input
Selects the internally set speed (Pn301, Pn302, Pn303). Internally set
speed
SPD2 [46] Speed selection
command 2 input
TVSEL
[41]
Control mode switch
input
ON: Change control mode Switch control
mode
PLOCK
[41]
Position lock com-
mand input
ON: Position lock goes into effect when the motor rota-
tion speed is no more than the position lock rotation
speed (Pn501).
Speed control
with position
lock
IPG [41] Pulse disable input ON: Command pulse inputs are ignored and the motor
stops.
Position control
with pulse-dis-
able
GSEL Gain switching input ON: Changes gain to No.2 speed gain (Pn104, Pn105,
Pn106).
Internally set
speed
PSEL
(See note
2.)
Command pulse fac-
tor switching input
ON: Rotates the motor using the position command
pulse multiplied by the value set in Pn217 (command
pulse factor). (When Pn218.0 = 1)
Position
Note 1. Function allocations for pin 40 to 46 sequence inputs can be set by means of user parameters
Pn50A to Pn50D. In this table, the numbers enclosed in brackets indicate the default pin num-
bers (allocations). The allocations vary depending on the control mode.
Note 2. This I/O signal is supported by Servo Drivers with software version “r.0037.”
D CN1 Control Outputs
Pin
No.
Signal name Function Contents Command
mode
1 GND Ground common Ground common terminal for the encoder output and
alarm code output
All
33 +A Encoder phase-A +
output
Outputs encoder pulses divided according to user param-
eter Pn201.
All
34 –A Encoder phase-A –
output
Line driver output (conforming to RS-422A).
36 +B Encoder phase-B +
output
35 –B Encoder phase-B –
output
Standard Models and Specifications Chapter 2
 Loading...
Loading...






