4-122
4-3 Functions When PG Option Board (3G3AX-PG01) Is Used
4
Functions
Torque Bias Function
This function applies bias to the torque reference generated by speed control, and is useful for ele-
vating applications (e.g. elevator).
*1. When torque bias is set to the
O2 terminal, -10 to +10 (V) is recognized as -200 to +200 (%).
*2. • When "00" (As per sign) is selected:
When the polarity of a torque bias signal is (+), the torque increases for forward rotation, and when it is (-),
the torque increases for reverse rotation, regardless of the RUN direction.
• When "01" (Depends on the RUN direction) is selected:
The torque bias signal polarity and torque bias direction vary depending on the RUN command direction.
Forward command: Applies torque in the same direction as the torque bias.
Reverse command: Applies torque in the opposite direction of the torque bias.
Torque Control
Under this function, the Inverter can be used in torque control, as well as in the speed and pulse
train position controls.
Torque control can be applied to winders, and more.
To run the Inverter in torque control mode, allocate "52" (ATR) to any of the multi-function inputs.
While the ATR terminal is turned on, the torque reference input is enabled.
In torque reference input selection P033, you can select one of the three analog inputs or the input
via the Digital Operator.
The torque control speed depends on the balance between torque and load. To prevent the Inverter
from running out of control, set a speed limit value in P039 (forward) or P040 (reverse).
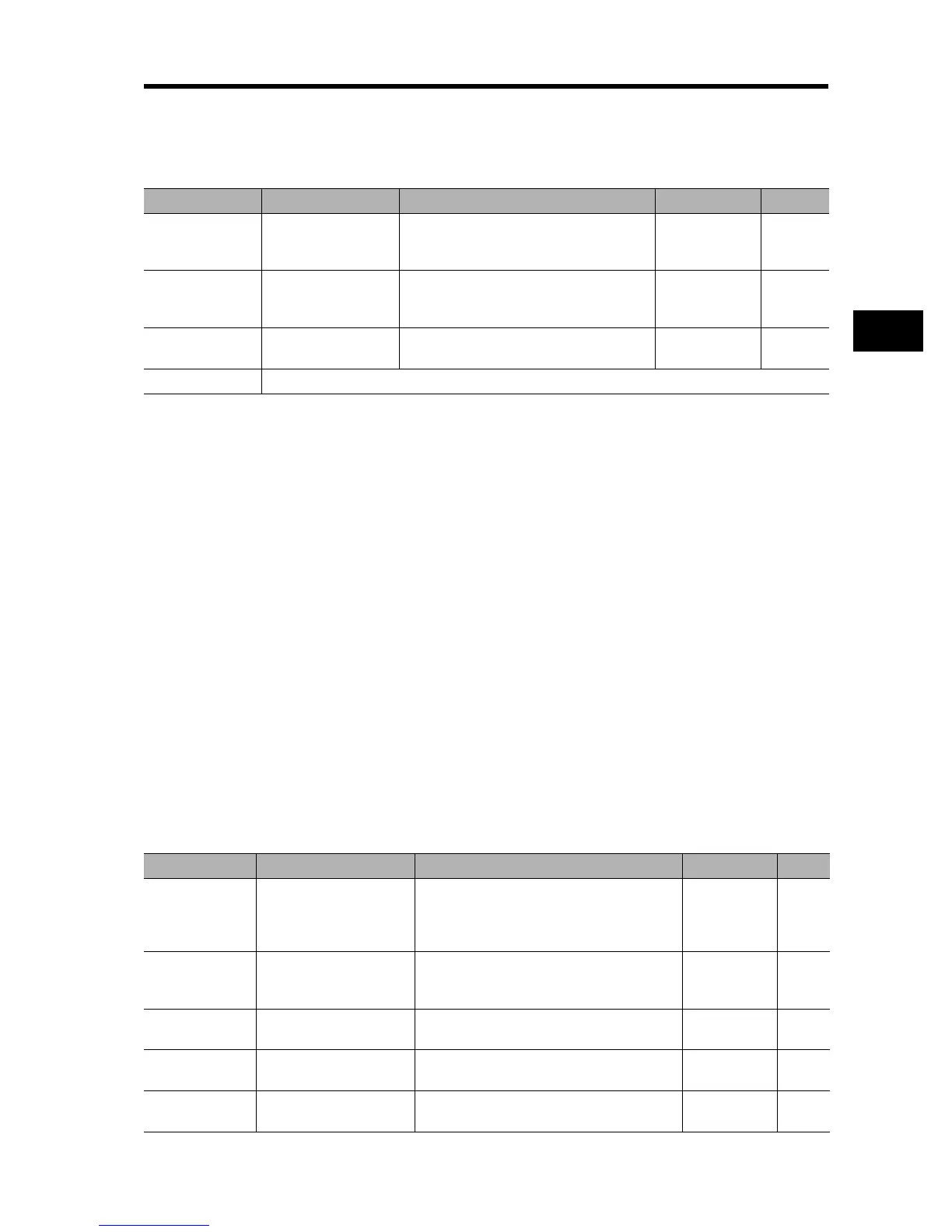
Parameter No. Function name Data Default setting Unit
P036 Torque bias mode
00: Disabled
01: Set via the Digital Operator
02: Set via terminal O2 *
1
00
P037 Torque bias value
-200. to +200. (0.4 to 55 kW)
-180. to +180. (75 to 132 kW)
Enabled when P036 = 01
0. %
P038
Torque bias polarity
selection *
2
00: As per sign
01: Depends on the RUN direction
00
Related functions d010
Parameter No. Function name Data Default setting Unit
P033
Torque reference input
selection
00: Input via terminal O
01: Input via terminal OI
02: Input via terminal O2
03: Input via the Digital Operator
00
P034 Torque reference setting
0. to 200. (0.4 to 55 kW)
0. to 180. (75 to 132 kW)
Torque reference when P033 = 03
0. %
P035
Polarity selection at
torque reference via O2
00: As per sign
01: Depends on the RUN direction
00 -
P039
Speed limit value in
torque control (forward)
0.00 to 99.99/100.0 to 400.0 0.00 Hz
P040
Speed limit value in
torque control (reverse)
0.00 to 99.99/100.0 to 400.0 0.00 Hz