4-127
4-3 Functions When PG Option Board (3G3AX-PG01) Is Used
4
Functions
Configuration Example
•Main motor : Number of encoder pulses = 1024
•Sub motor : Number of encoder pulses = 3000
•Main motor rpm:Sub motor rpm = 2:1
For operation under the above conditions, set the following data in the slave Inverter.
Electronic gear setting position selection (P019) : 01 (REF)
Electronic gear ratio numerator (P020) : 3000
Electronic gear ratio denominator (P021) : 1024 × 2 = 2048
Electronic gear ratio
denominator (P021)
2048 1024 2048 1024
Slave rpm/Master rpm 1/2 2 2 1/2
Electronic gear setting
position selection
(P019)
REF
(Position
command side)
REF
(Position
command side)
FB
(Position feedback side)
FB
(Position feedback side)
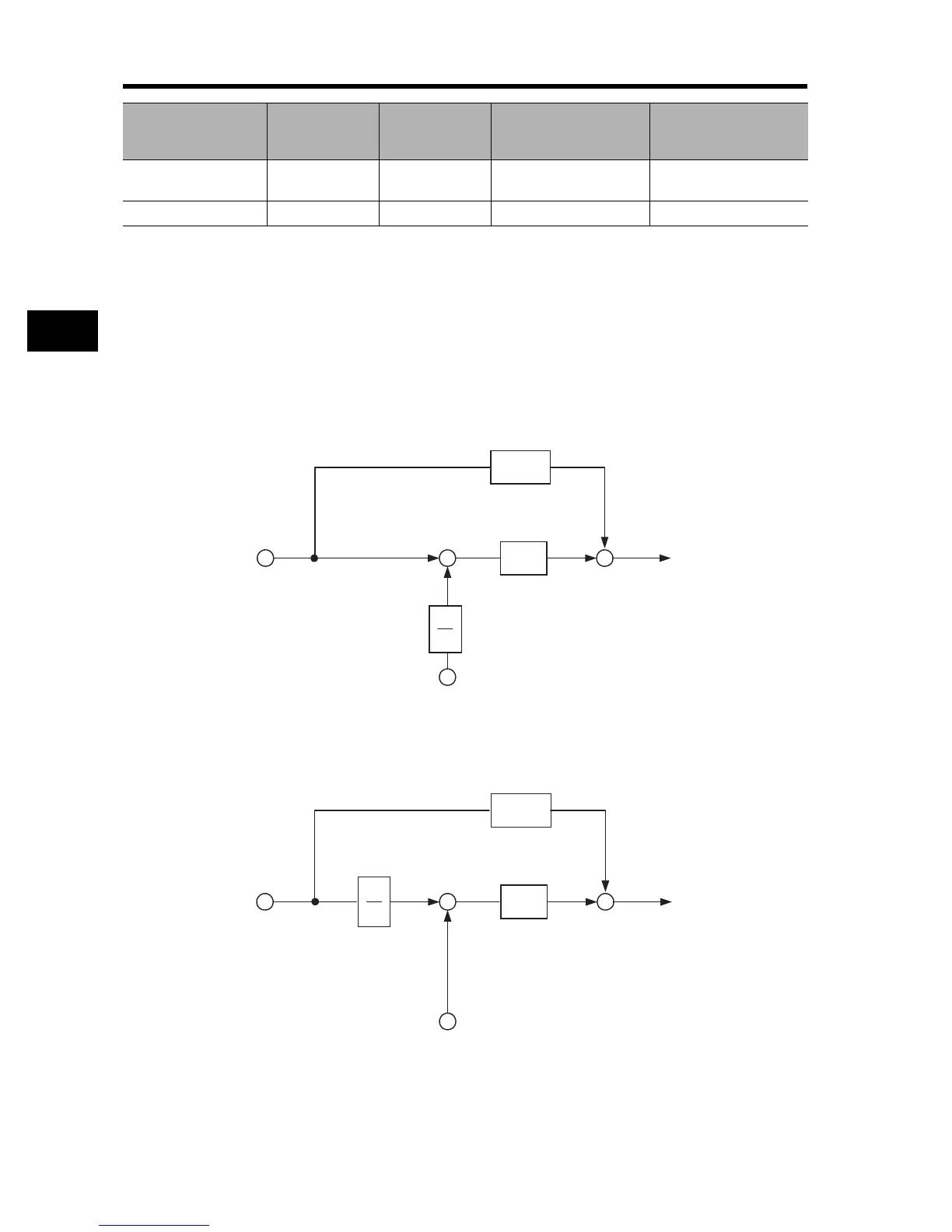
G
Position loop gain
ASR
REF
FB
-
N
D
FFWG
+
+
+
Electronic gear setting position =00(FB) selected
Position control
feedforward gain
G
Position loop gain
ASR
REF
FB
-
N
D
FFWG
+
+
+
Electronic gear setting position =01(REF) selected
Position control
feedforward gain