4-132
4-3 Functions When PG Option Board (3G3AX-PG01) Is Used
4
Functions
Absolute Position Control Operation
In the absolute position control mode, the Inverter moves to the target position according to the fol-
lowing parameter settings, and is then set in the position servo lock status.
• Position command
• Speed command (frequency reference)
• Acceleration/Deceleration time
(The servo lock status is retained until the RUN command is turned off.)
The frequency reference and acceleration/deceleration command for absolute position control con-
form to the items selected when the RUN command is turned on.
P074 Teaching selection
00: Multi-step position command 0 (P060)
01: Multi-step position command 1 (P061)
02: Multi-step position command 2 (P062)
03: Multi-step position command 3 (P063)
04: Multi-step position command 4 (P064)
05: Multi-step position command 5 (P065)
06: Multi-step position command 6 (P066)
07: Multi-step position command 7 (P067)
00
C169
Multi-step
speed/position
determination time
0. to 200.: × 10 ms 0 ms
d029
Position command
monitor
1073741823 to +1073741823
d030
Current position
monitor
1073741823 to +1073741823
C001 to C008
Multi-function inputs
1 to 8 selection
45: ORT (orientation)
54: SON (servo ON)
66: CP1 (position command selection 1)
67: CP2 (position command selection 2)
68: CP3 (position command selection 3)
69: ORL (zero return limit signal)
70: ORG (zero return startup signal)
71: FOT (forward driving stop)
72: ROT (reverse driving stop)
73: SPD (speed/position switching)
C102
Reset selection 03: Does not initialize internal data during reset. 0
Parameter No. Function name Data Default setting Unit
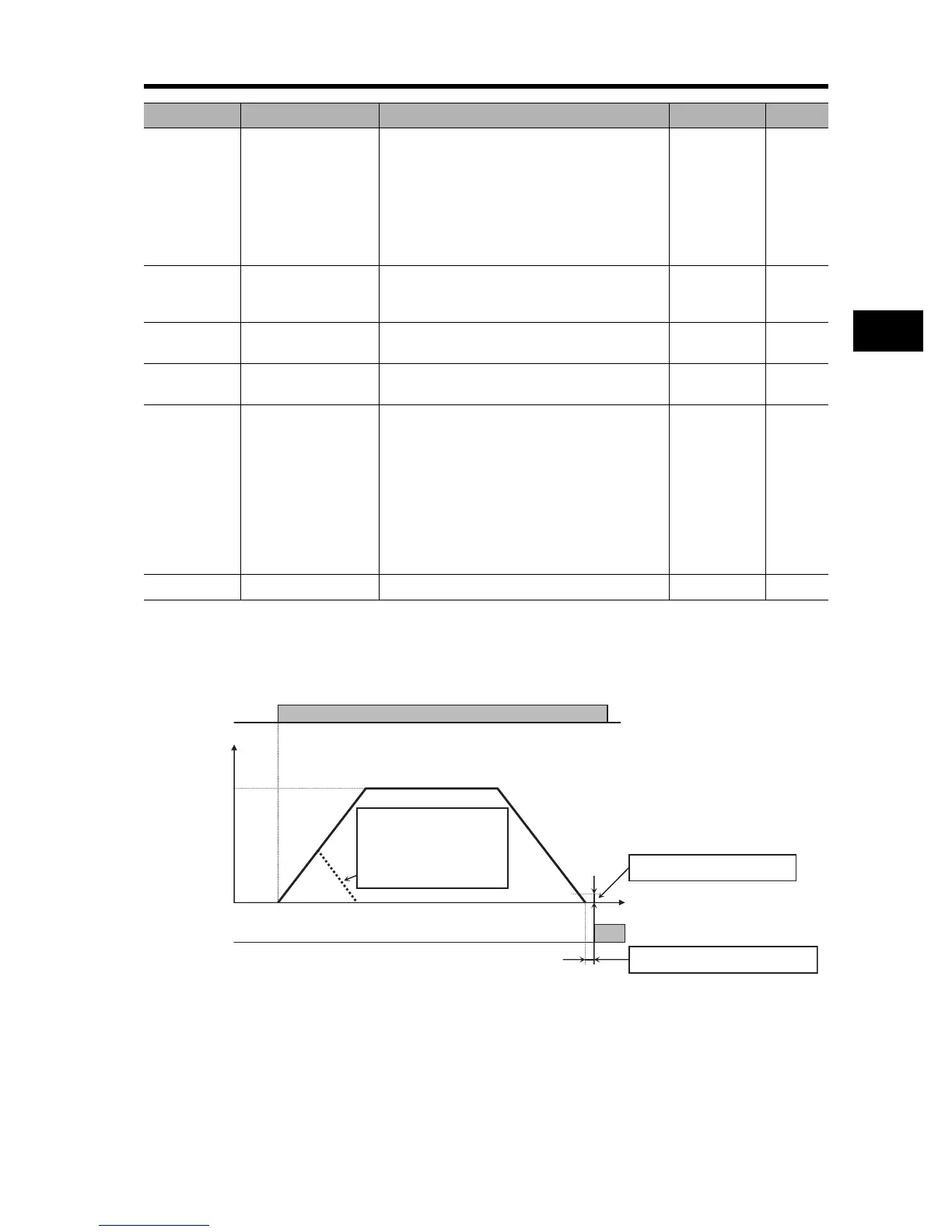
ON
Output
frequency (Hz)
Position
Speed
command
RUN command ON
Position ready range setting (P017)
Position ready delay time setting (P018)
POK signal
When the position command
level is low, the motor
decelerates and its position is
determined before the output
frequency reaches the speed
command level.