3-26
3-7 Parameter List
3
Operation
Upper/Lower limit, Jump
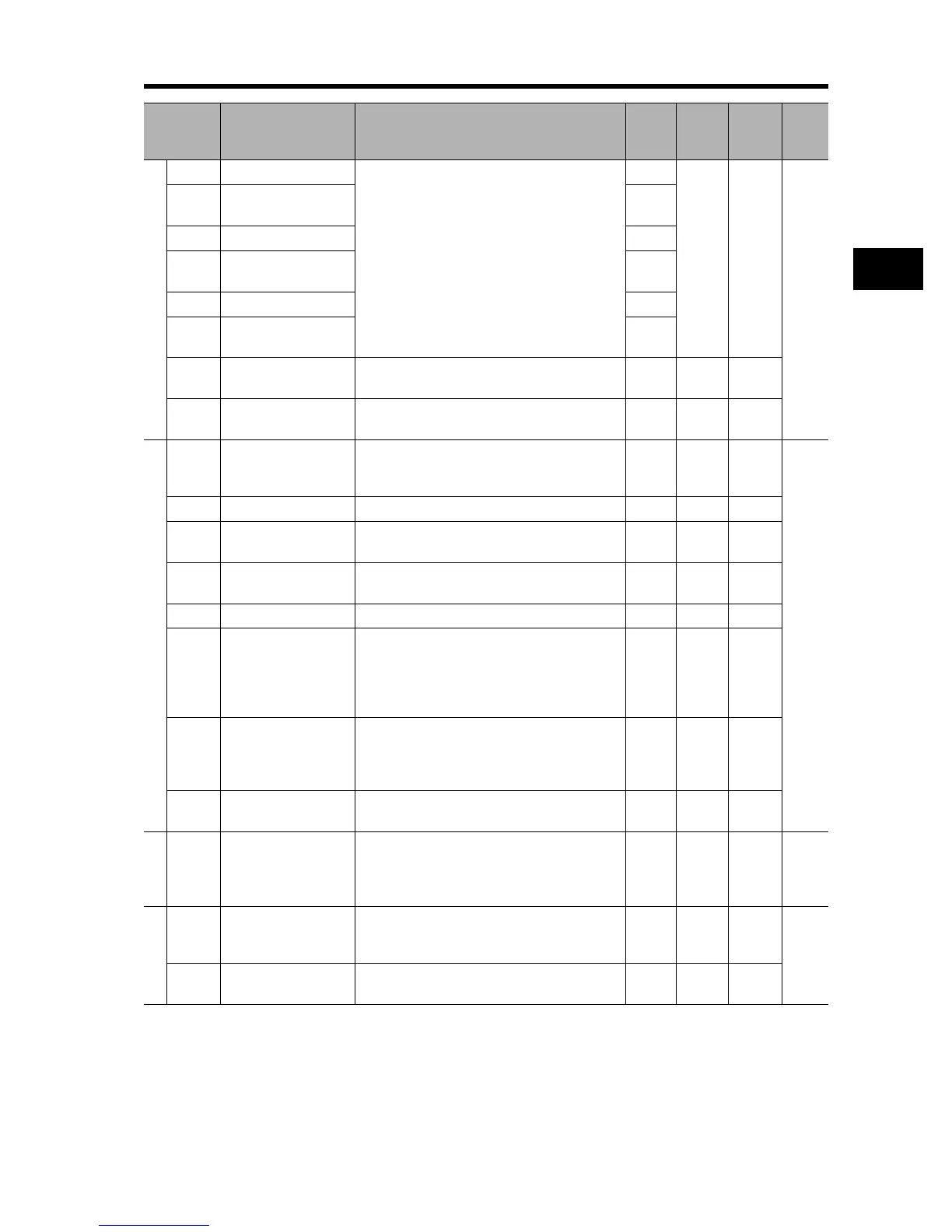
A063 Jump frequency 1
Jump frequency: 0.0 to 400.0
Jump frequency width: 0.0 to 10.0
0.00
No Hz
4-30
A064
Jump frequency
width 1
0.50
A065 Jump frequency 2 0.00
A066
Jump frequency
width 2
0.50
A067 Jump frequency 3 0.00
A068
Jump frequency
width 3
0.50
A069
Acceleration stop
frequency
0.00 to 99.99
100.0 to 400.0
0.00 No Hz
A070
Acceleration stop
time
0.0 to 60.0 0.0 No s
PID control
A071 PID selection
00: Disabled
01: Enabled
02: Reverse output enabled
00 No
4-31
A072 PID P gain 0.2 to 5.0 1.0 Yes
A073 PID I gain
0.0 to 999.9
1000. to 3600.
1.0 Yes s
A074 PID D gain
0.00 to 99.99
100.0
0.00 Yes s
A075 PID scale 0.01 to 99.99 1.00 No Time
A076
PID feedback
selection
00: OI
01: O
02: RS485 communication
03: Pulse train frequency
10: Operation function output
00 No
A077 Reverse PID function
00: OFF (Deviation = Target value -
Feedback value)
01: ON (Deviation = Feedback value - Target
value)
00 No
A078
PID output limit
function
0.0 to 100.0 0.0 No %
PID control
A079
PID feedforward
selection
00: Disabled
01: O
02: OI
03: O2
00 No 4-31
AVR
A081 AVR selection
00: Always ON
01: Always OFF
02: OFF during deceleration
02 No
4-35
A082
AVR voltage
selection
200-V class: 200/215/220/230/240
400-V class: 380/400/415/440/460/480
200/
400
No V
Parameter
No.
Function name Monitor or data range
Default
setting
Changes
during
operation
Unit Page
* 2nd/3rd control is displayed when "SET(08)/SET3(17)" is allocated to one of multi-function inputs from C001
to C008.