3-5SectionCommunication Time
48
3-4-14 End Code List
End codes are given in two digits as hexadecimal numbers.
Type End
code
Name
During normal
00 Normal end code
operation
7B Low battery voltage warning (battery need to be replaced) (see note 1)
74 Command received, DC not close (see notes 2 and 3)
75 Command autoprocessing canceled (before processing communications with DC)
76 Command autoprocessing canceled (DC is near and processing is canceled during or after
communications)
Error in
10 Parity error
communications
11 Framing error
w
t
ost
computer
12 Overrun error
13 FCS error (only for 1 to N connection)
14 Command input error
18 Frame length maximum error
Error in local
70 DC communications error
communications
71 Disagreement error
72 DC not present
7A Address too high
7C R/W Head not connected
7D Write protect error
DC memory
warning
75 Normal end code returned (with no error) after data check command or MDL command was
executed
76 Error code returned after data check command or MDL command was executed
Note 1. Processing
is normal when 7B as
an end code has been returned. If the volt
-
age of the battery is low and no communications are available, an error
response such as 72 will be returned.
2. When
a polling auto command is sent, the ID Controller promptly returns a
“command received” response (74).
3. When a polling auto command is sent to query processing results, the ID
Controller
returns a “DC near” response (74)
if the DC is not present. Refer
to
6-3 Error Lists
for more details on the errors.
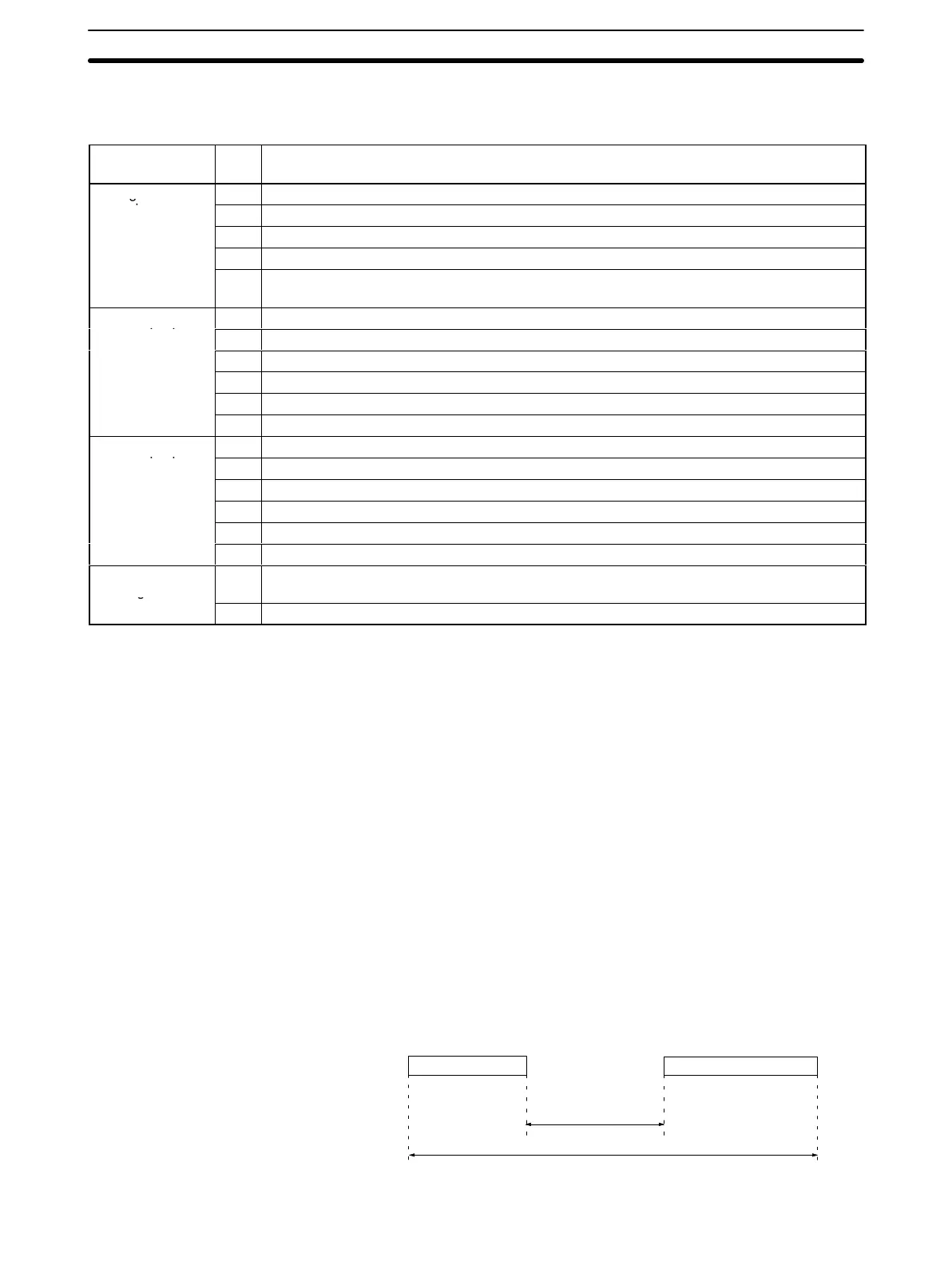
3-5 Communication
T
ime
The
time required for communications varies with the DC memory type (SRAM
or EEPROM). Furthermore, if the memory is EEPROM, communications time
varies
with the slave communications mode setting. The communications time
consists of TAT (turn around time) and slave communications time. TAT is the
time required for the host computer to receive a response after it has finished
sending
a command. Slave communications
time is the time required for com
-
munications between the R/W Head and DC and is exclusive of host commu-
nications
time. Slave communications time is used as a reference when calcu
-
lating the moving speed of an auto command.
RDH
1 –––––– *)
RD 0 0 1 1 2 2 –––––– *)
(Example)
Command
Time required for
communications
with slave
Response
TAT
 Loading...
Loading...