8.3 SensorCoordinateFrame
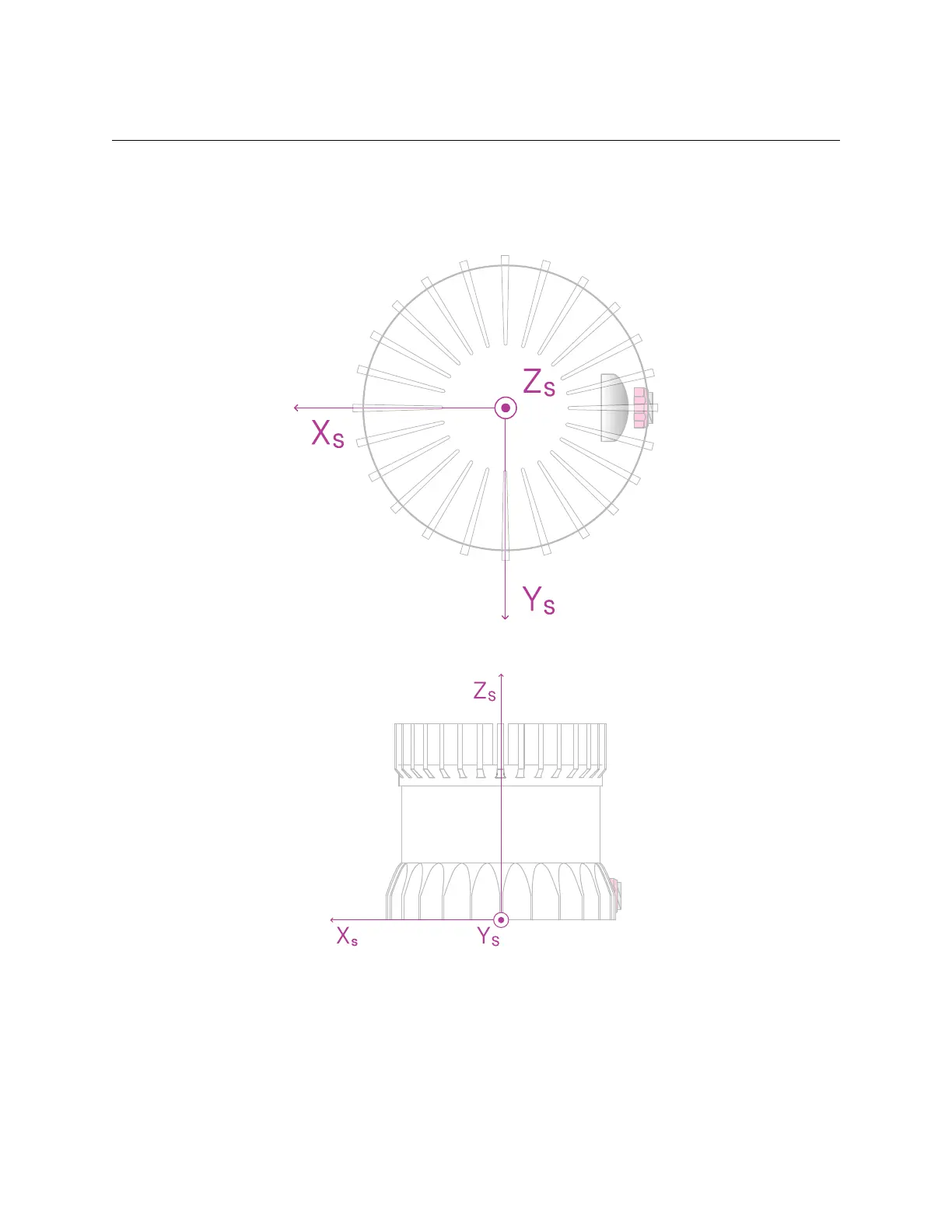
The Sensor Coordinate Frame follows the right-hand rule convention and is defined at the center of
thesensorhousingonthebottom,withthex-axispointedforward,y-axispointedtotheleftandz-axis
pointed towards the top of the sensor. The external connector is located in the negative x direction.
TheSensor CoordinateFrameis marked inthediagrambelow withX
S
,Y
S
,Z
S
.
Figure8.3: Top-downviewof SensorCoordinateFrame
Figure8.4: Sideview ofSensor CoordinateFrame
13
 Loading...
Loading...


