H-845 Hexapod System MS222E Version: 2.1.1 59
In this Chapter
Specifications .............................................................................................................. 59
Ambient Conditions and Classifications ...................................................................... 63
Dimensions of the hexapod ......................................................................................... 64
Pin Assignment for the hexapod ................................................................................. 66
10.1 Specifications
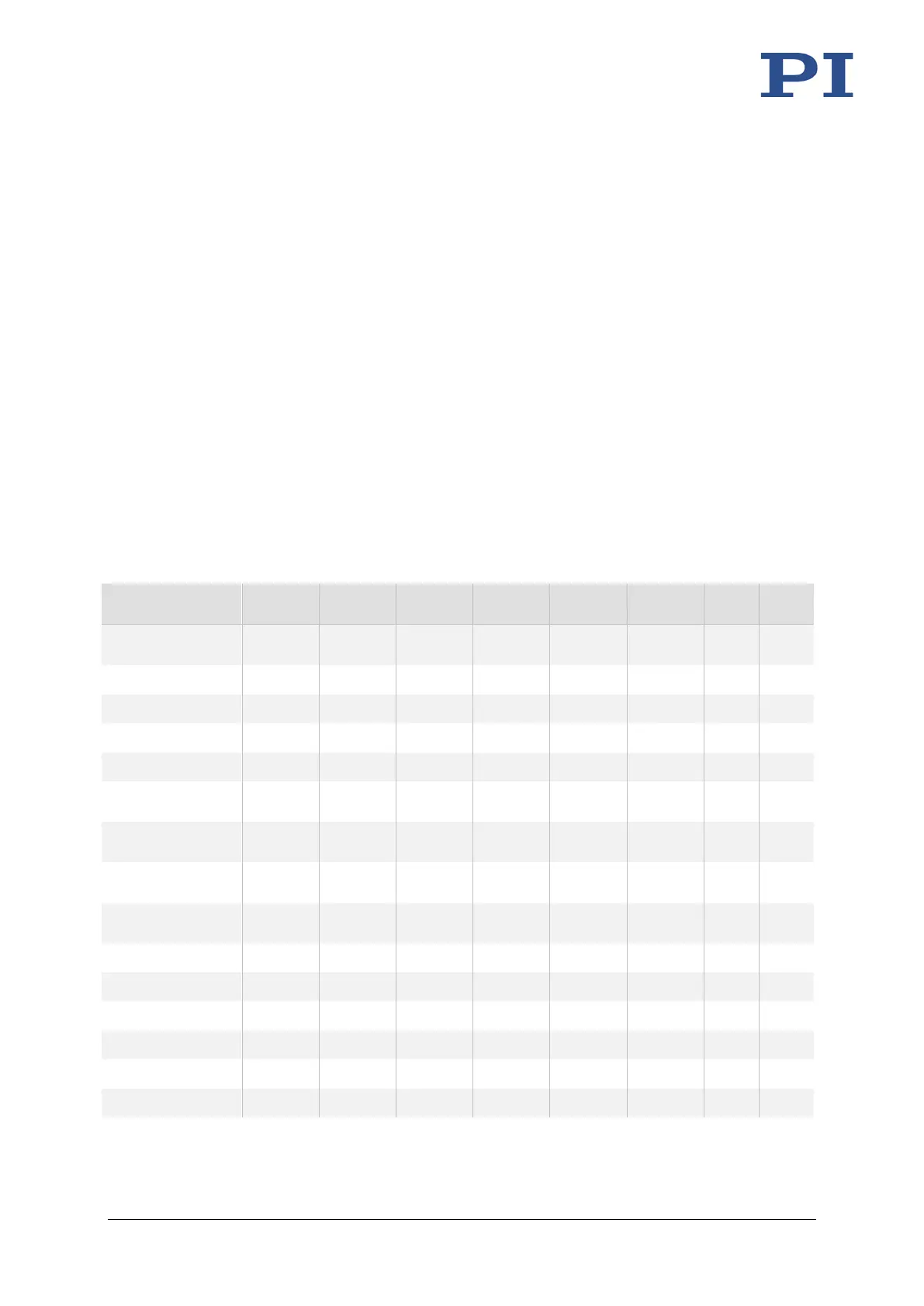
10.1.1 Data Table Hexapod
Motion and
positioning
H-845.D11 H-845.D31 H-845.D51 H-845.D21 H-845.D41 H-845.D61 Unit Tole-
rance
Active axes X, Y, Z,
θ
X
, θ
Y
, θ
Z
X, Y, Z,
θX, θY, θZ
X, Y, Z,
θX, θY, θZ
X, Y, Z,
θX, θY, θZ
X, Y, Z,
θX, θY, θZ
X, Y, Z,
θ
X
, θ
Y
, θ
Z
Travel range* X, Y ±110 ±110 ±110 ±170 ±170 ±170 mm
Travel range* Z ±50 ±50 ±50 ±105 ±105 ±105 mm
Travel range* θ
X
, θ
Y
±15 ±15 ±15 ±20 ±20 ±20 °
Travel range* θ
Z
±30 ±30 ±30 ±30 ±30 ±30 °
Actuator design
resolution
0.04 0.08 0.1 0.04 0.08 0.1 µm
Min. incremental
motion X, Y
1 2 2.5 1 2 2.5 µm typ.
Min. incremental
motion Z
0.5 1 1 0.5 1 1 µm typ.
Minimum incremental
motion θ
X
, θ
Y
, θ
Z
15 30 30 15 30 30 µrad typ.
Backlash X, Y 5 10 10 5 10 10 µm typ.
Backlash Z 1 2 2 1 2 2 µm typ.
Backlash θ
X
, θ
Y
15 30 30 15 30 30 µrad typ.
Backlash θ
Z
30 60 60 30 60 60 µrad typ.
Repeatability X, Y ±2 ±4 ±5 ±2 ±4 ±5 µm typ.
Repeatability Z ±0.5 ±1 ±2 ±0.5 ±1 ±2 µm typ.
Technical Data