OB7 Collaborative Robot User Manual Version 0.6
OB7 Control Functions / 73
When picking up an object from another machine, it is usually necessary for the machine to release its
hold on the object. Use this selection to activate another machine during the pick operation.
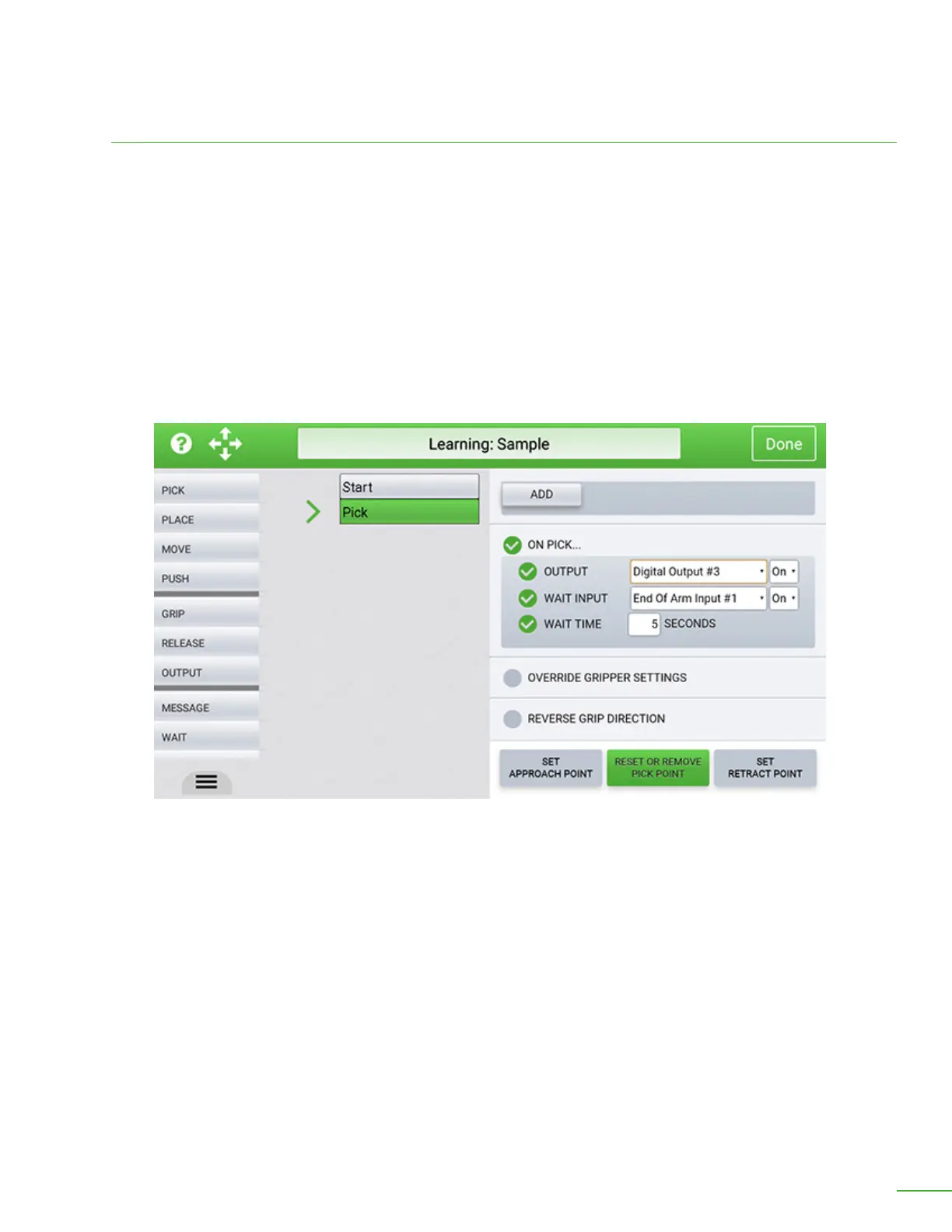
On Pick:
Specify the “Pick” options (used when OB7 must communicatewith another machine).
Output: Check here in order to signal the other machine to release the object. Select the output to
use for this signal.
Wait Input: Check here if it is necessary to wait for the machine to signal that it has released the
object. Select the input to check for this signal.
Wait Time: Check here to add a time delay before moving away with the object.
 Loading...
Loading...