PUDU T300 Operation Guide
Version: V1.0.2 Operation Guide
31
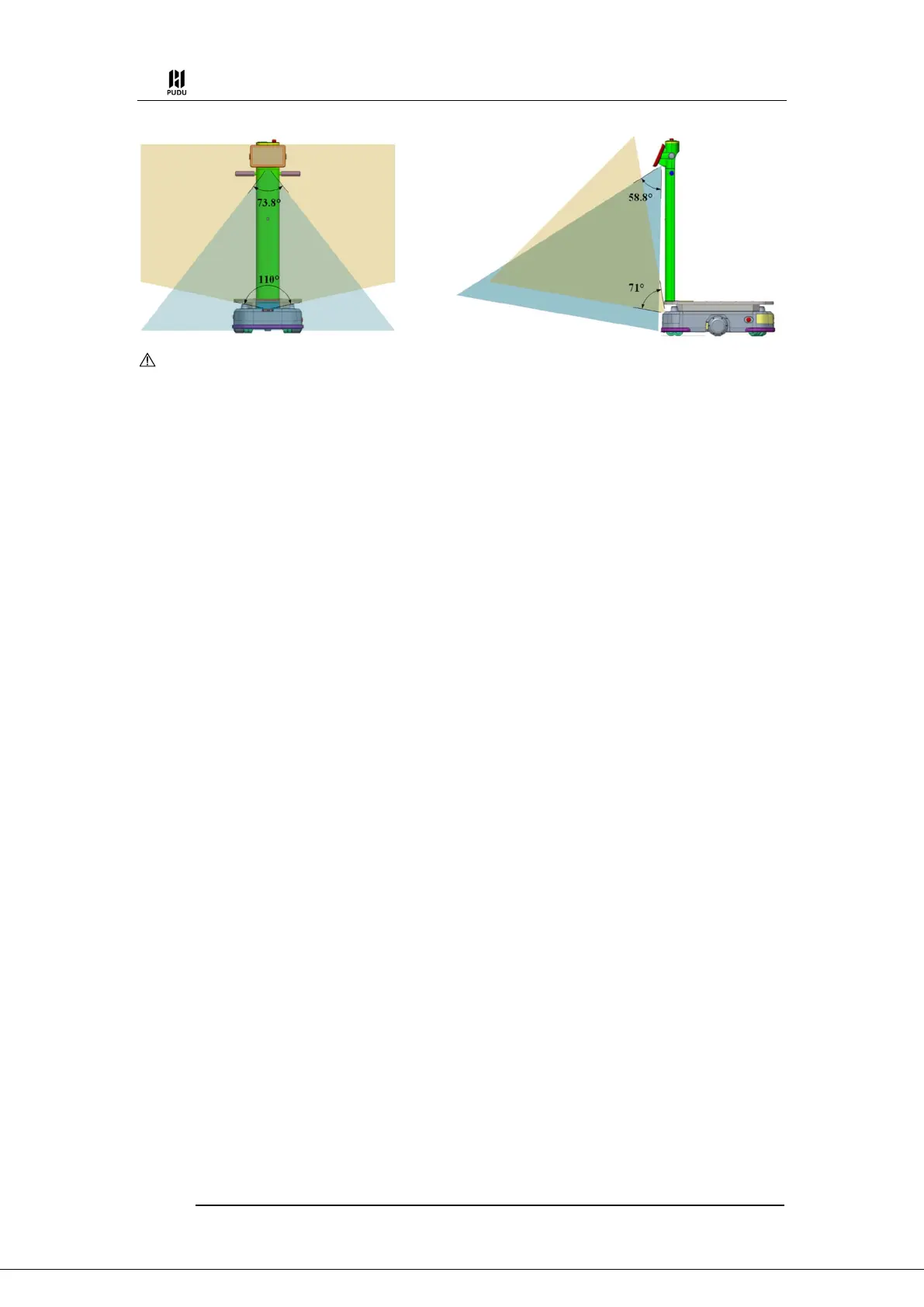
Caution
In environments with direct sunlight, the RGBD cameras may have abnormal detection. It is recommended to
avoid running the robot in environments with direct sunlight.
If there are transparent objects (such as glass) or reflective obstacles (such as mirrors) in the environment, the
RGBD cameras may not accurately detect them. It is recommended to avoid running the robot in such environments
or set up virtual walls on the map.
(3) Collision switches
The collision switches are located at the front and rear edges of the robot's chassis. If the collision
sensors are hit during robot operation, the robot will stop moving and pause the task. Follow the
instructions on the interface to resume the task.
 Loading...
Loading...


