PUDU T300 Operation Guide
Version: V1.0.2 Operation Guide
30
5. Robot Operation
5.1 Description of Robot Operation Logic
The robot uses sensors to determine its position within the map. When a task is given to the
robot, it will autonomously plan the best path to reach the target location based on the topological
path drawn on the map.
As the robot travels along the planned path, it will guide itself to avoid obstacles that are
detected but not recorded on the map, in order to prevent collisions between the robot and the
obstacles.:
5.2 Obstacle Detection
The robot continuously detects obstacles while it is moving to ensure safe operation. The
sensors involved in obstacle detection include:
Lidar
RGBD
Collision switches
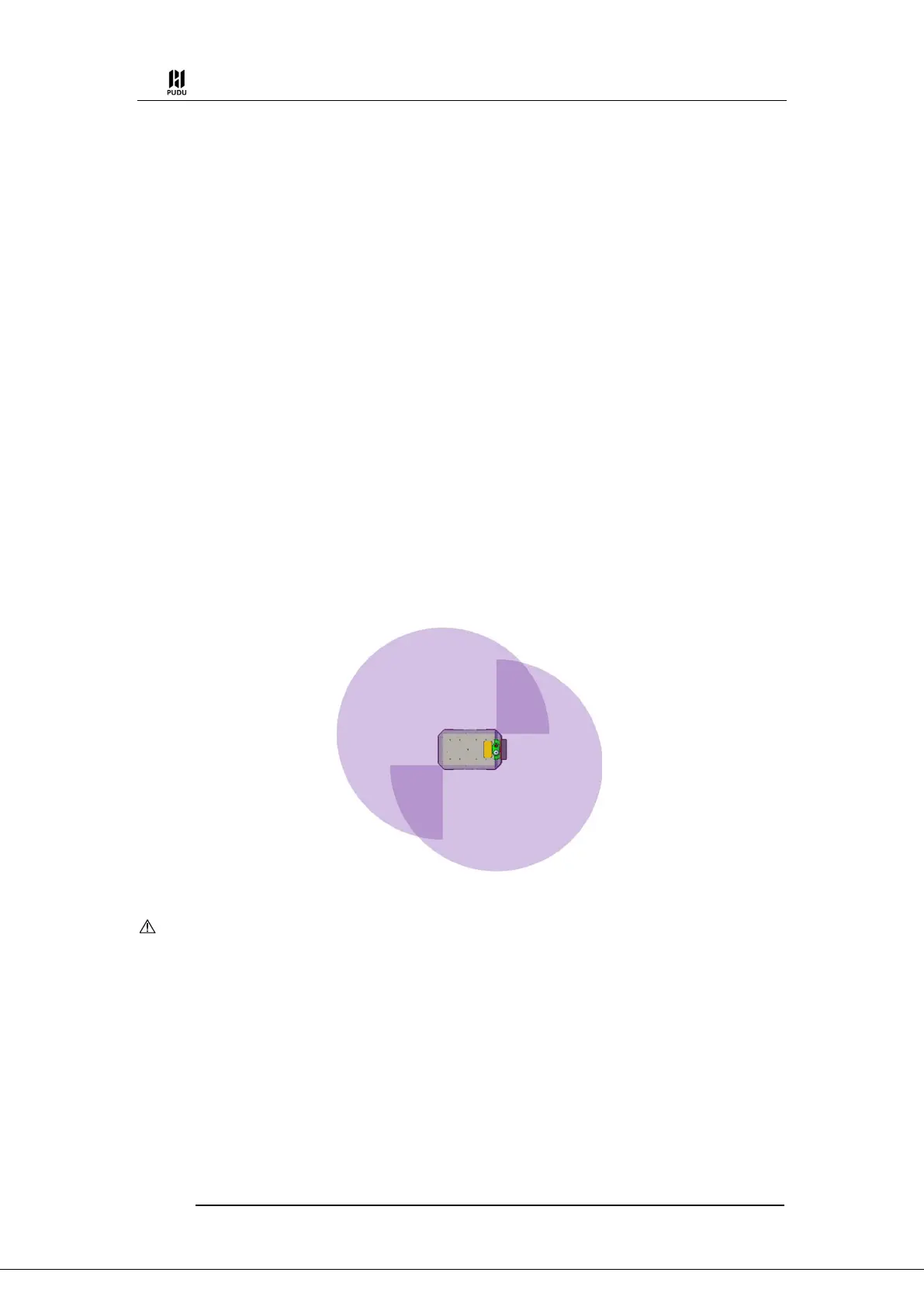
(1) Lidar
The robot scans the surrounding environment using lidars installed at the diagonals of the
chassis, achieving a 360° detection around the robot. The specific range is as follows:
Caution:
The LiDAR can only scan the ground plane at a height of 19cm.
If there are transparent objects (such as glass) or reflective obstacles (such as mirrors) in the environment, the
data from the LiDAR may have deviations. It is recommended to place frosted stickers or other markers at a height
of 19cm or set up virtual walls on the map.
(2) RGBD
The robot is equipped with two RGBD cameras on the front side, which can perform
stereoscopic detection of obstacles in front of the robot. The specific range of detection for the robot
is as follows:

 Loading...
Loading...

