Radiolink Electronic Ltd
www.radiolink.com
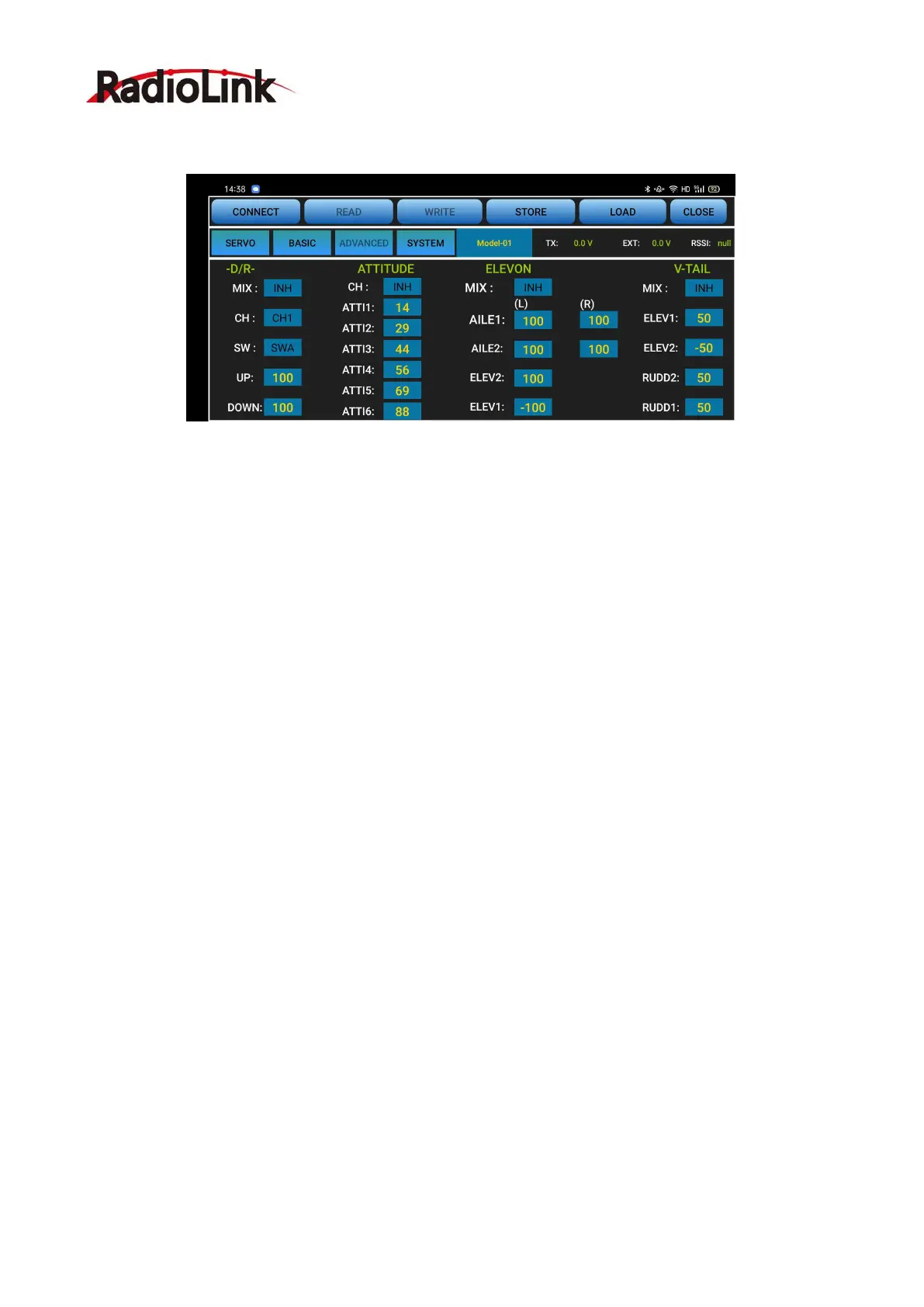
3.3.3 ADVANCED Menu
There are four parameters to setup:” D/R” “ATTITUDE” “ELEVON” “V-TAIL”
D/R: Sets the auxiliary switch to control the max and min values of corresponding channel range. Turn on
“MIX” (mix control) first and choose an auxiliary switch to flip and set the max/min range value to its
corresponding channel by toggling. In the example picture shown above: When flip SWA upward and toggle
CH1 stick, it means the max/min range of CH1 can be +100 and -100. If the UP value modified to 50, it means
the max range can only be +50/-50 when toggle CH1 up and down. ‘DOWN” means when flip SWA downward,
the max/min value of CH1 is +100/-100.
ATTITUDE: Select the preferred channel from CH5 through CH8. CH5 is always the default switch to change
attitude when connect to flight controller PIXHAWK/MINI PIX/APM/TURBO PIX while CH7 is default when
connect to DJI flight controller. For the default channel to switch attitudes, please refer to the flight
controller user manual.
The values behind each channel means different control percentage output different control signals. The
default values of T8FB of each attitude is corresponding to the values of flight controller PIXHAWK/MINI
PIX/APM/TURBO PIX. That is, when the above flight controllers are used with T8FB, attitude can be selected
on the Mission Planner and no need to setup specific parameter.
ELEVON: Turn on “MIX” (mix control) first, adjust the aileron distance and allow aileron differential.
ADJUSTABILITY:
• CH1 and CH2 are required.
• Independently adjustable aileron travel allows aileron differential.
• Independently adjustable elevator travel allows for differences in up & down travel.
• The separate ELEVON settings for each condition can be set. (GLIDER only)
V-TAIL: This function is used on the V-tail aircraft.
V-TAIL mixing is used with v-tail aircraft so that both elevator and rudder functions are combined for the two tail
surfaces. Both elevator and rudder travel can be adjusted independently on each surface.
ADJUSTABILITY:
• CH2 and CH4 are required.
• Independently adjustable travel allows for differences in servo travels.
• Rudder differential is not available. To create rudder differential, set RUDD1 and RUDD2 as 0, then use two
programmable mixes in SYSTEM Menu, RUD-ELE and RUD-RUD, setting different percentages for up and
down. These are new rudder travels. Turn the trim and link off, switch assignment null so rudder won’t be
 Loading...
Loading...










