26 S1 Wheel and Tiller Pilots Commissioning Guide
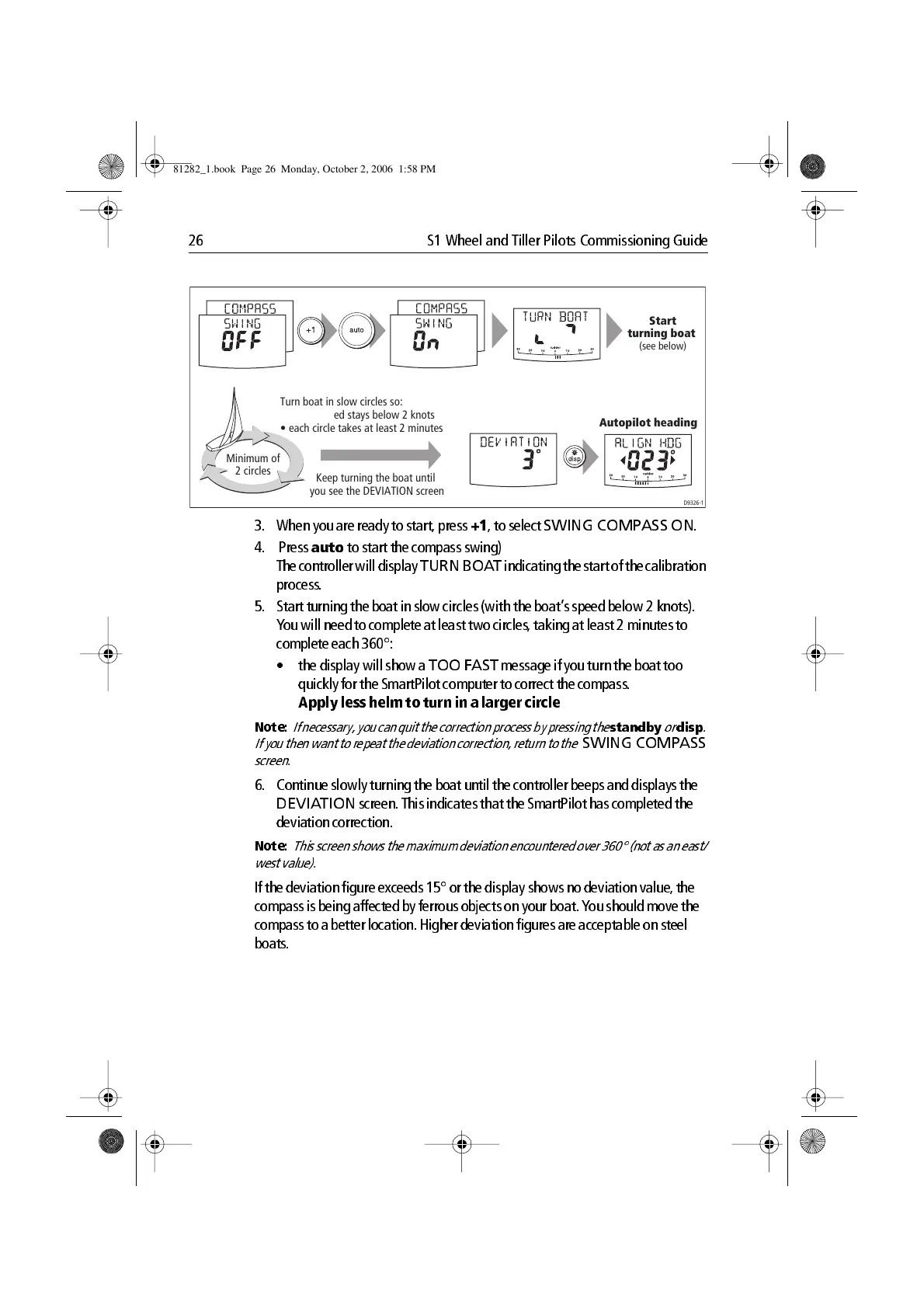
3. When you are ready to start, press
+1
, to select
SWING COMPASS ON
.
4. Press
auto
to start the compa ss swing)
The controller will display
TURN BOA T
indicating the start of the calibration
process.
5. Start turning the b oat in slow circles (with the boat’ s speed below 2 knots).
Y ou will n eed to complete at least two circles , taking at least 2 minutes to
comp lete each 360°:
• the displ ay will show a
TOO FAST
message if you turn the boat too
quickly for the SmartPilot comp uter to correct the comp ass.
Apply less helm to turn in a larger circle
Note:
If necess ary, you can quit the correctio n process b y pressing the
standby
or
disp
.
If you then want to repeat the deviation correction, return to the
SWING COMPASS
screen.
6. Continue slowly turning the boat un til the controller beeps an d displays the
DEVIATION
screen. T his indicates that the SmartPilot ha s completed the
deviation correction.
Note:
This screen sho ws the maximum deviat ion encountered over 360° (not as an east/
west v alue).
If the deviation figure exceeds 15° or the display shows no deviation value , the
comp ass is being affected by ferrous objects on your boat. Y ou should move the
comp ass to a better location. H igher deviation figures are acc eptable on steel
boats.
D9326-1
Turn boat in slow circles so:
• boat's speed stays below 2 knots
• each circle takes at least 2 minutes
Minimum of
2 circles
Keep turning the boat until
you see the DEVIATION screen
Start
turning boat
(see below)
Autopilot heading
81282_1.book Page 26 Monday, October 2, 2006 1:58 PM

 Loading...
Loading...








