ADAPTIVE CRUISE CONTROL
3
262 - Driving
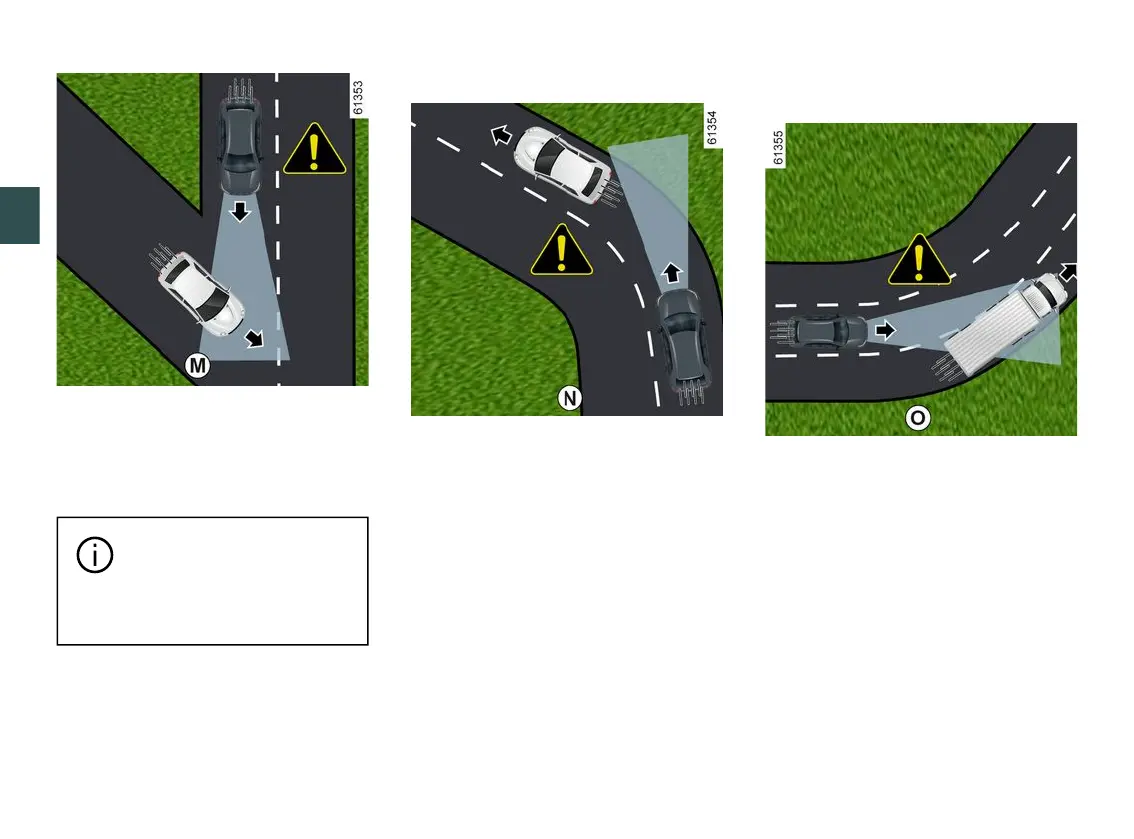
The system cannot detect:
– vehicles arriving at intersections: slip
road (e.g.
M
), etc.;
– vehicles driving on the wrong side of
the road or reversing towards you.
The Stop and Go adaptive
cruise control must be used
outside built-up areas, on
wide roads with visible lines.
Detection during cornering
When entering a corner or bend, the
radarand/orcameramaybetemporar-
ily unable to detect the vehicle in front
(e.g.
N
).
The system may trigger an accelera
tion.
Whenexitingabend,thesystem'sde-
tection of the vehicle in front may be
disrupted or delayed.
The system may trigger inappropri
ate or delayed braking.
Detection of vehicles in adjacent
lanes
Thesystemmaydetectvehiclesdri-
ving on an adjacent lane when:
– you drive into a bend (e.g.
O
);
– youaredrivingonaroadwithnar-
row lanes;
– thespeedofthevehicleontheadja-
cent lane is slower and if one of these
vehicles is located too close to the
lane of the other.
The system may incorrectly trigger
vehicle slowing or braking.