Robotiq Hand-E Gripper Instruction Manual
Info
Data is calculated at the resulting position of the force applied, based on the strength of the M3 screws used. Maximum
grasping force is included in calculations. It represents the maximum force that can be added to the finger (payload
force + external force).
Warning
Calculations do not take fatigue, robot acceleration and safety concerns into account.
Caution
In order to address other custom specific cases with regards to your own application, pay special attention to screws
strength when mounting fingers.
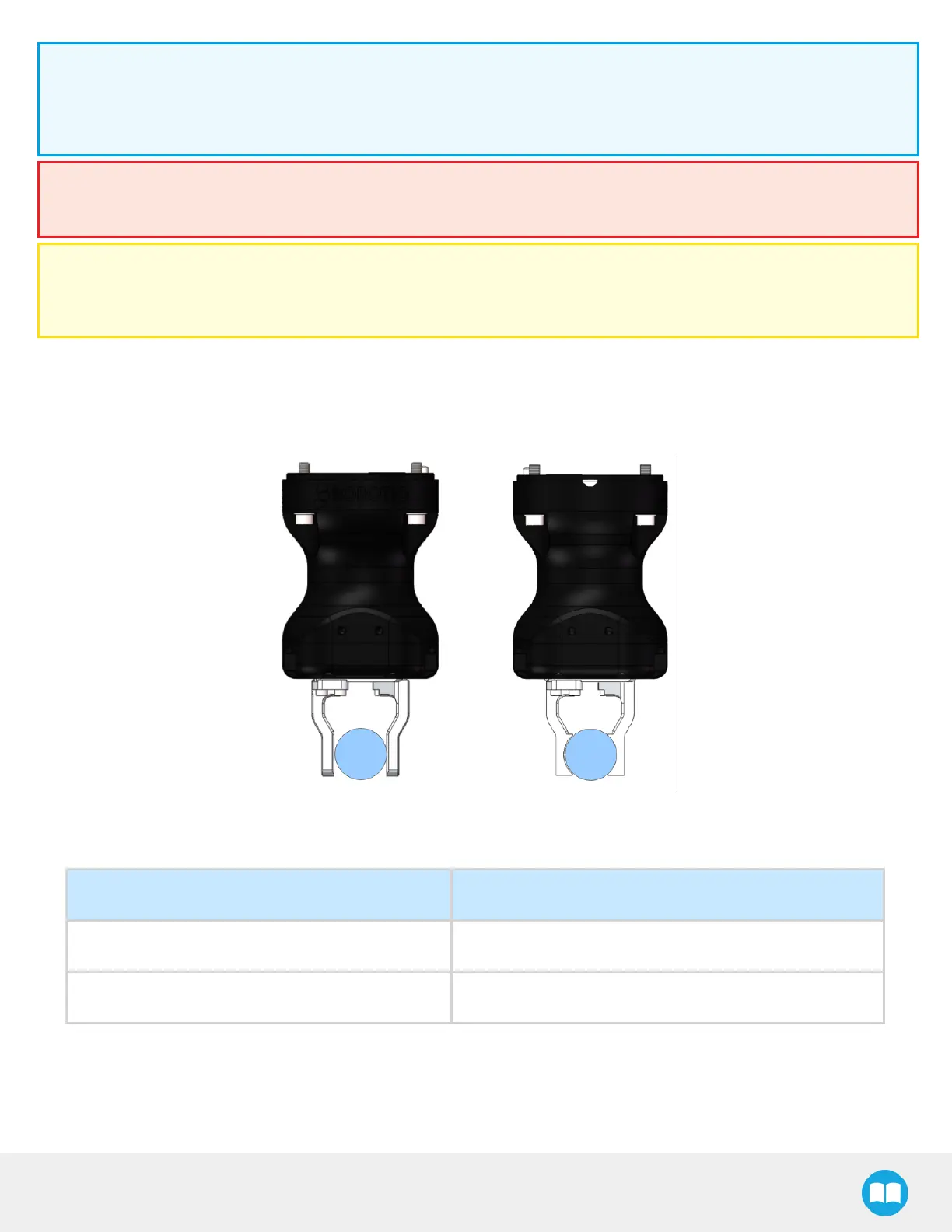
Friction grasp and form-fit grasp
Fig. 5-12: Friction grasp and form-fit grasp.
Maximum payload by grasp type
Grasp Type Maximum Payload
Friction grasp 4.7 kg
Form-fit grasp 5 kg
88