Rockwell Automation Publication 2080-UM002N-EN-E - November 2022 379
Appendix H User-defined Function Block Motion Instructions
4 Homing in reverse direction and regard NL as homing origin. Go forward to Z pulse.
5 Homing in reverse direction and regard NL as homing origin. Do not look for Z pulse.
6
Homing in forward direction, ORG: OFF->ON as homing origin. Return to Z pulse. Shows error when
encounter limit.
7
Homing in forward direction, ORG: OFF->ON as homing origin. Return to Z pulse. Reverse direction
when encounter limit.
8
Homing in forward direction, ORG: OFF->ON as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
9
Homing in forward direction, ORG: OFF->ON as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
10
Homing in forward direction, ORG: OFF->ON as homing origin. Do not look for Z pulse. Shows error
when encounter limit.
11
Homing in forward direction, ORG: OFF->ON as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
12
Homing in reverse direction, ORG: OFF->ON as homing origin. Return to Z pulse. Shows error when
encounter limit.
13
Homing in reverse direction, ORG: OFF->ON as homing origin. Return to Z pulse. Reverse direction when
encounter limit.
14
Homing in reverse direction, ORG: OFF->ON as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
15
Homing in reverse direction, ORG: OFF->ON as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
16
Homing in reverse direction, ORG: OFF->ON as homing origin. Do not look for Z pulse. Shows error when
encounter limit.
17
Homing in reverse direction, ORG: OFF->ON as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
18 Look for Z pulse in forward direction and regard it as homing origin. Shows error when encounter limit.
19
Look for Z pulse in forward direction and regard it as homing origin. Reverse direction when encounter
limit.
20 Look for Z pulse in reverse direction and regard it as homing origin. Shows error when encounter limit.
21
Look for Z pulse in reverse direction and regard it as homing origin. Reverse direction when encounter
limit.
22
Homing in forward direction, ORG: ON->OFF as homing origin. Return to Z pulse. Shows error when
encounter limit.
23
Homing in forward direction, ORG: ON->OFF as homing origin. Return to Z pulse. Reverse direction
when encounter limit.
24
Homing in forward direction, ORG: ON->OFF as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
25
Homing in forward direction, ORG: ON->OFF as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
26
Homing in forward direction, ORG: ON->OFF as homing origin. Do not look for Z pulse. Shows error
when encounter limit.
27
Homing in forward direction, ORG: ON->OFF as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
28
Homing in reverse direction, ORG: ON->OFF as homing origin. Return to Z pulse. Shows error when
encounter limit.
29
Homing in reverse direction, ORG: ON->OFF as homing origin. Return to Z pulse. Reverse direction when
encounter limit.
30
Homing in reverse direction, ORG: ON->OFF as homing origin. Go forward to Z pulse. Shows error when
encounter limit.
31
Homing in reverse direction, ORG: ON->OFF as homing origin. Go forward to Z pulse. Reverse direction
when encounter limit.
32
Homing in reverse direction, ORG: ON->OFF as homing origin. Do not look for Z pulse. Shows error when
encounter limit.
33
Homing in reverse direction, ORG: ON->OFF as homing origin. Do not look for Z pulse. Reverse direction
when encounter limit.
34 Define current position as the origin.
35
Look for the collision point in forward direction and regard it as the origin. Return to Z pulse. Shows
error when encounter negative limit.
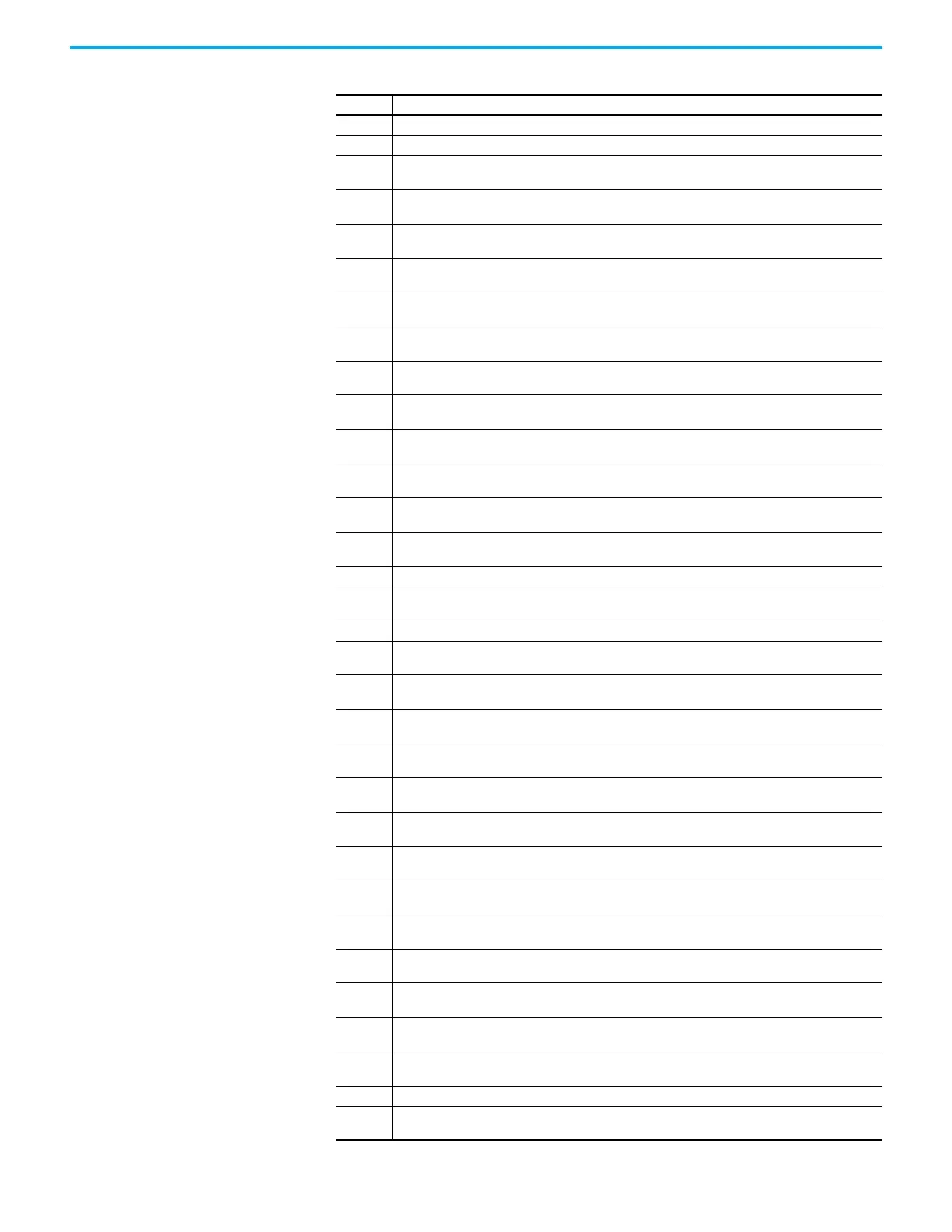
Table 117 - Homing Methods (Continued)
Value Description

 Loading...
Loading...






