70 Rockwell Automation Publication 750-RM100A-EN-P - August 2019
Chapter 9 Reference Motion Planners
10/11:931 [Ref Move Type] provides a selection of useful move profile types with easy
switching between them.
When 10/11:931 [Ref Move Type] = (0) ‘LinScurve’, it provides the standard motion
profile type used in 750 series drives. A similar move can be generated simply by selecting
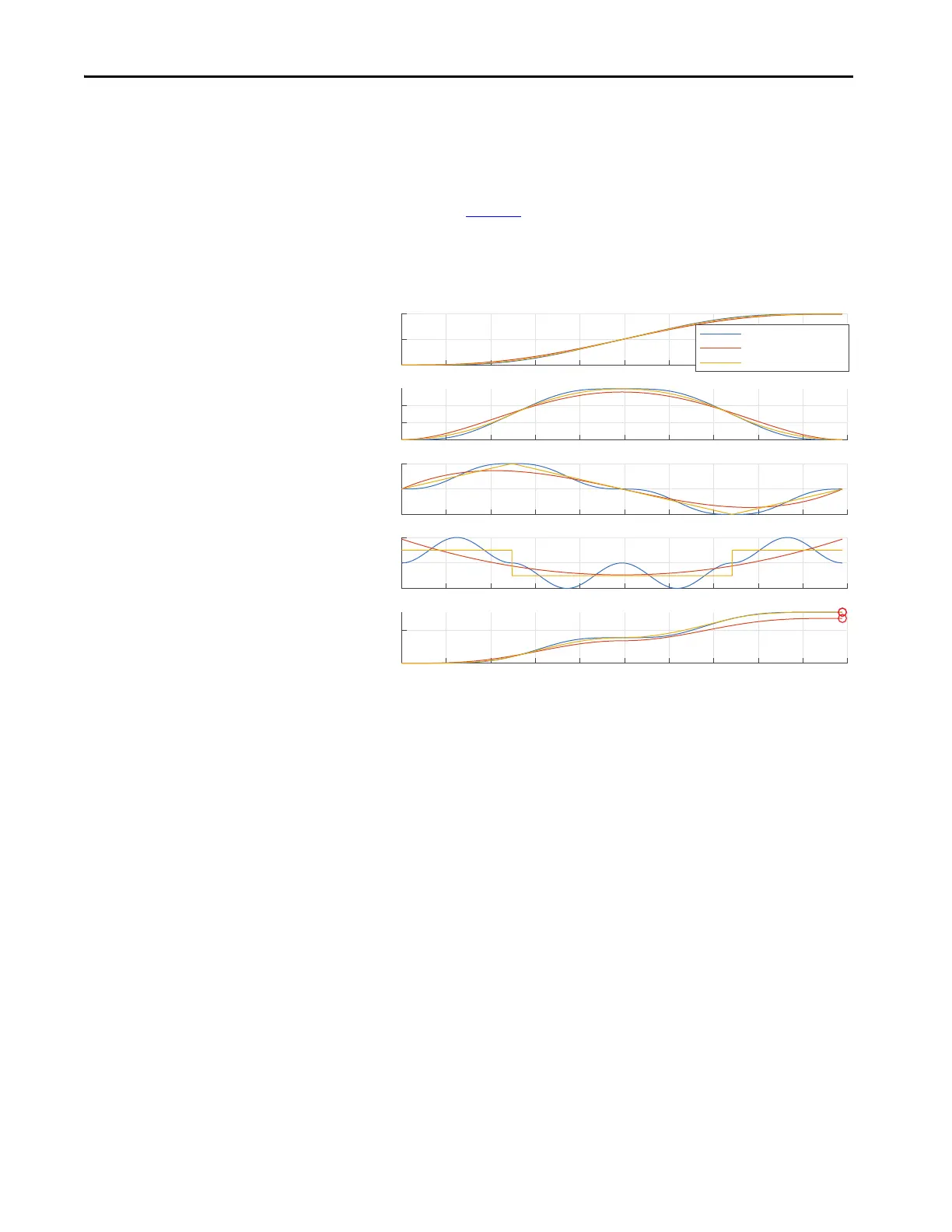
a different move type. Figure 18
shows different move types for a 10,000 count index
move with 1 second acceleration and deceleration times and a maximum velocity of 150
RPM (5Hz for an 1800 RPM motor).
Figure 18 - Index Moves with Different Move Types
Note the following relationships:
• Sine Squared is the smoothest. It trades maximum velocity and
acceleration for smoothness.
• Poly5 trades end point smoothness for lower maximum velocity, maximum
acceleration, minimum jerk, and energy.
• LinScurve and Cubic are the least smooth. They generate trapezoidal
moves and trade smoothness for lower maximum jerk.
Step 2—Configure Move Distance
Adjust parameters described in the following table to define your target distance. You can
enter a constant set point or select an input signal. Note that as an input signal changes,
the PTP reference motion planner acts as a filter with a combined cam-on-cam effect.
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
5000
10000
Pos
[counts]
Compare Trajectories
Sine Squared
Poly5
LinScurve and Cubic
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
0
50
100
Vel
[RPM]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-5
0
5
Accel
[rev/sec
2
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
-20
0
20
Jerk
[rev/sec
3
]
0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
Time [sec]
0
2
Energy
[rev
2
/sec
3
]

 Loading...
Loading...











