44 Rockwell Automation Publication 750-AT006D-EN-P - January 2022
Chapter 2 Product Features
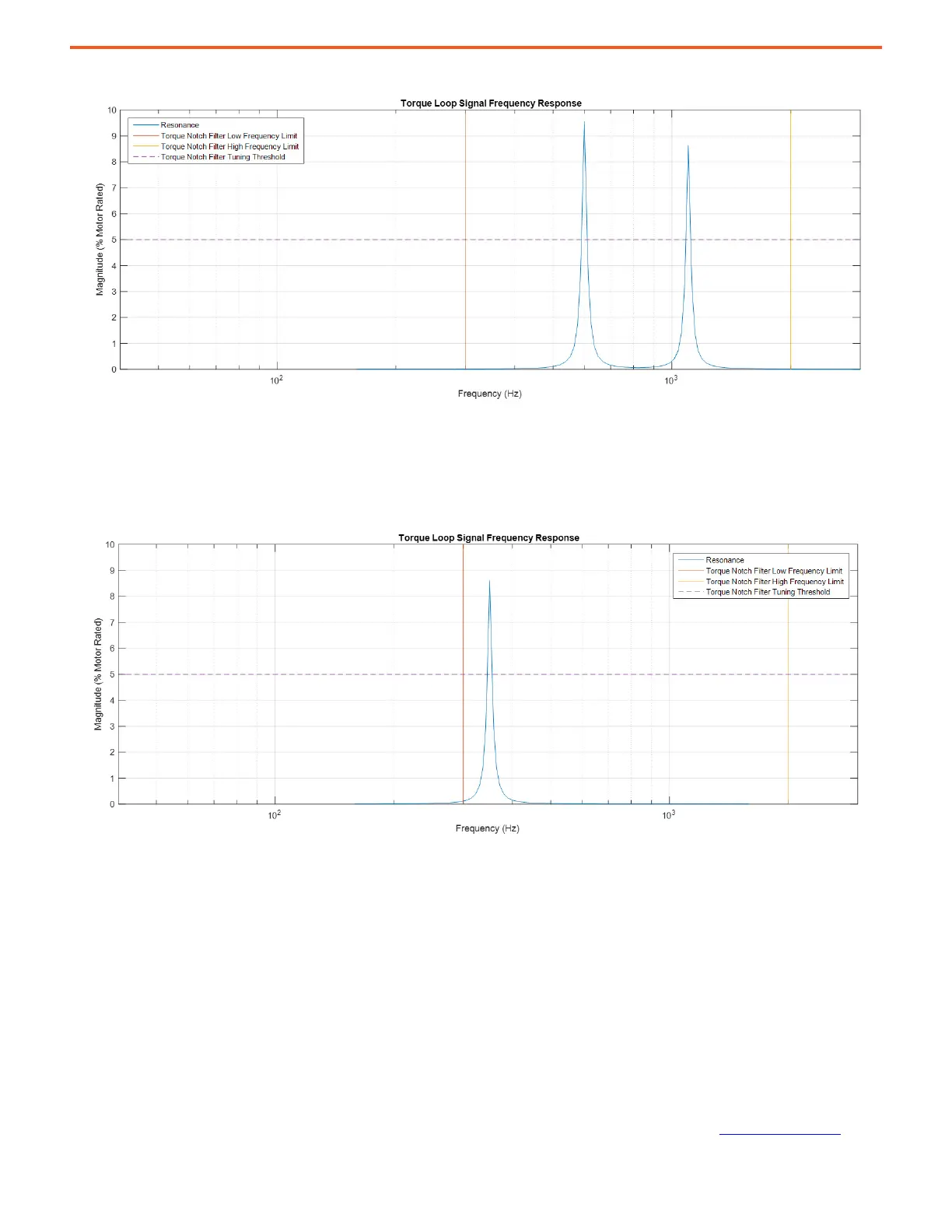
Figure 44 - Identifying More HF Resonances than there are Notch Filters
Finally, if the system is unstable, the adaptive tuning Gain Stabilization functions incrementally detunes the position loop, velocity loop, and
load observer gains to stabilize the system if necessary.
A good example is when an MF resonance is identified.
Figure 45 - Identifying One MF Resonance
In this example, the torque notch filter 1 is set to suppress the resonance if it is the only HF resonance or if it is the one with the largest
magnitude. If not, the low pass filter is set to suppress it and any other HF resonances. Finally, the system is detuned if one or more of the
following conditions exist:
• The torque notch filter 1 is set to suppress the MF resonance, but its width is wide enough or its frequency is close enough to the
closed loop bandwidth to cause instability.
• The torque low pass filter is set to suppress the MF resonance, but its bandwidth is close enough to the closed loop bandwidth to
cause instability.
• Additional unsuppressed resonances are present.
Gain Optimization
10:2110 [AdptTune Config] = Gain Opt (11) – In this mode, adaptive tuning applies the Tracking Notch function if necessary, followed by Gain
Stabilization or Gain Optimization function if necessary.
When an LF resonance is detected with a magnitude less than the 10:2135 [GnOpt TorqueLim] threshold line, see Figure 35 on page 35
, Gain
Optimization increases 10:2121 [AdptTune GnScale] to greater than 1.0 in additive increments until the LF resonance magnitude increases
 Loading...
Loading...


