Rockwell Automation Publication 750-AT006D-EN-P - January 2022 57
Chapter 3 Out-of-Box Tuning
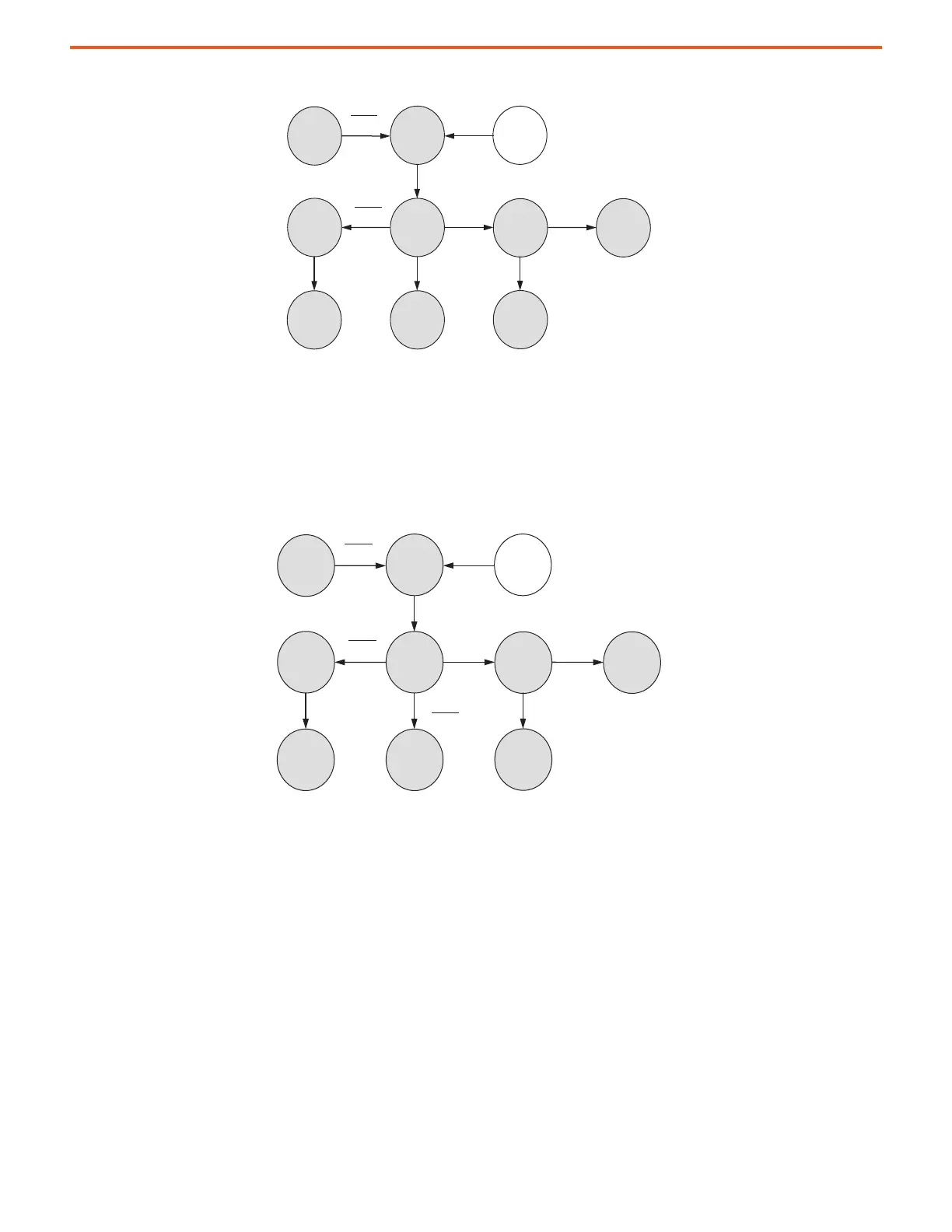
Figure 57 - Out-of-Box Gain Relationships for Load Observer Only or Acceleration Feedback
Velocity Estimate Only
When 10:901 [Load Ratio] = 0 and 10:2020 [LdObs Mode] = Vel Est Only (3), the load observer bandwidth increases by 4Z
2
because the velocity
estimate removes enough phase lag from the closed loop to do so while maintaining stability. Also K
VI
is enabled to remove any velocity
steady state error that this load observer mode setting produces.
Figure 58 - Out-of-Box Gain Relationships for Velocity Estimate Only
Load Observer with Velocity Estimate
When 10:901 [Load Ratio] = 0 and 10:2020 [LdObs Mode] = LdObs VelEst (2), the load observer bandwidth increases by 4Z
2
because the
velocity estimate removes enough phase lag from the closed loop to do so while maintaining stability. Also, K
VI
is disabled because load
observer operates as a good velocity integrator. This mode is recommended for position control applications. Load Observer with Velocity
Estimate automatically accounts for the arbitrary load disconnect created by the load, which forces it to function like a mechanically
disconnected motor. As a result, standard 4Z
2
spacing sufficient for controlling a mechanically disconnected motor is applied.
0
K
PI
K
PP
K
VP
K
VI
0
1
2
4
1
Z
K
OP
K
OI
0
LPF
5
System
BW
1
T
BW
2
4
1
Z
2 Hz
(Open Loop
Virtual Encoder)
0
2
4
1
Z
2
4Z
2
4
1
Z
0
5
1
2
4
1
Z
2 Hz
(Open Loop
Virtual Encoder)
 Loading...
Loading...


