Construction
20222303 / A 9
2 CONSTRUCTION
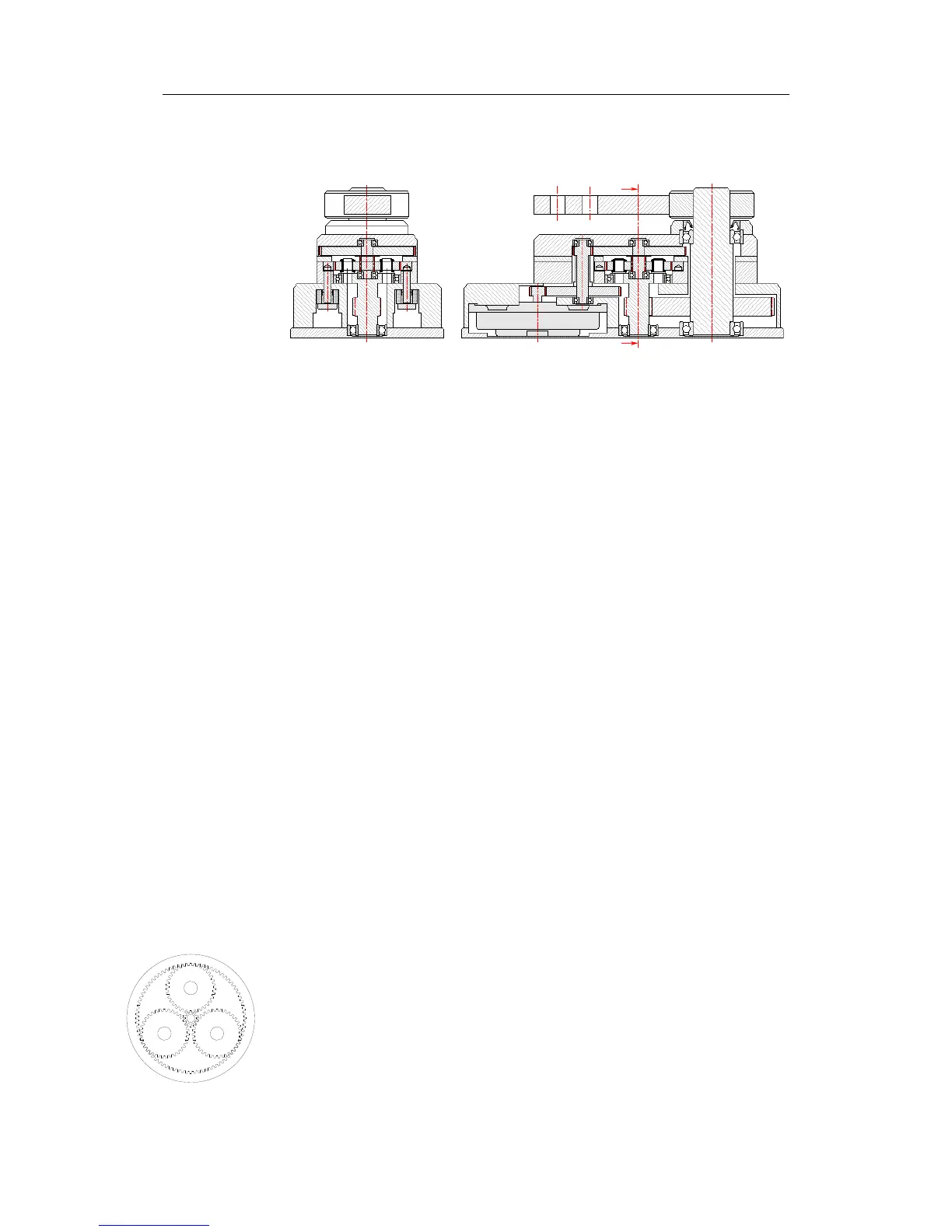
This assembly drawing shows a cross section of the direct drive.
The drive can be separated in 5 main parts: The electric motor,
the two step spur gearbox, the planetary gearbox, the electro-
magnetic clutch and the final spur reduction gearbox. The
Simrad direct drive has multiple advantages over existing
integrated drive units. These advantages will be explained per
section of the drive:
2.1 Electric Motor
The flat wound electric motor (pancake motor) used in the
Simrad direct drive is carefully selected for this application.
Pancake motors have multiple advantages over normal electric
DC motors:
• A large flat wound rotor to achieve a high starting toque and
an immediate response to the autopilot speed control signal.
• A motor efficiency of 72,5% to achieve a minimal power
consumption and maximal mechanical power output
(compared to max. 50% efficiency of a normal DC motor).
• Compact main dimensions compared to achievable output.
• Aluminum motor housing in stead of sheet steel plate to
avoid corrosion.
2.2 Planetary gearbox
To achieve a correct rudder travel speed (hard over time) the
electric motor has to be reduced in speed with a factor 750:1.
Some autopilot drive producers use a worm reduction box, but
the efficiency is extremely low as the gears rub each other. The
Simrad direct drive uses a combination of a planetary gearbox
and spur gear sets (one small gear and one big gear). The
planetary gearbox has following advantages: