70 | Autopilot operation
Depth gain
This parameter determines the ratio between commanded rudder and the deviation from
the selected depth contour. The higher depth gain value the more rudder is applied.
If the value is too small it will take a long time to compensate for drifting off the set
depth contour, and the autopilot will fail to keep the boat on the selected depth.
If the value is set too high the overshoot will increase and the steering will be unstable.
Contour Cross Angle (CCA)
The CCA is an angle that is added to or subtracted from the set course.
With this parameter you can make the boat yaw around the reference depth with lazy-s
movements.
The larger the CCA the bigger yawing will be allowed. If you the CCA set to zero there is
no S-ing.
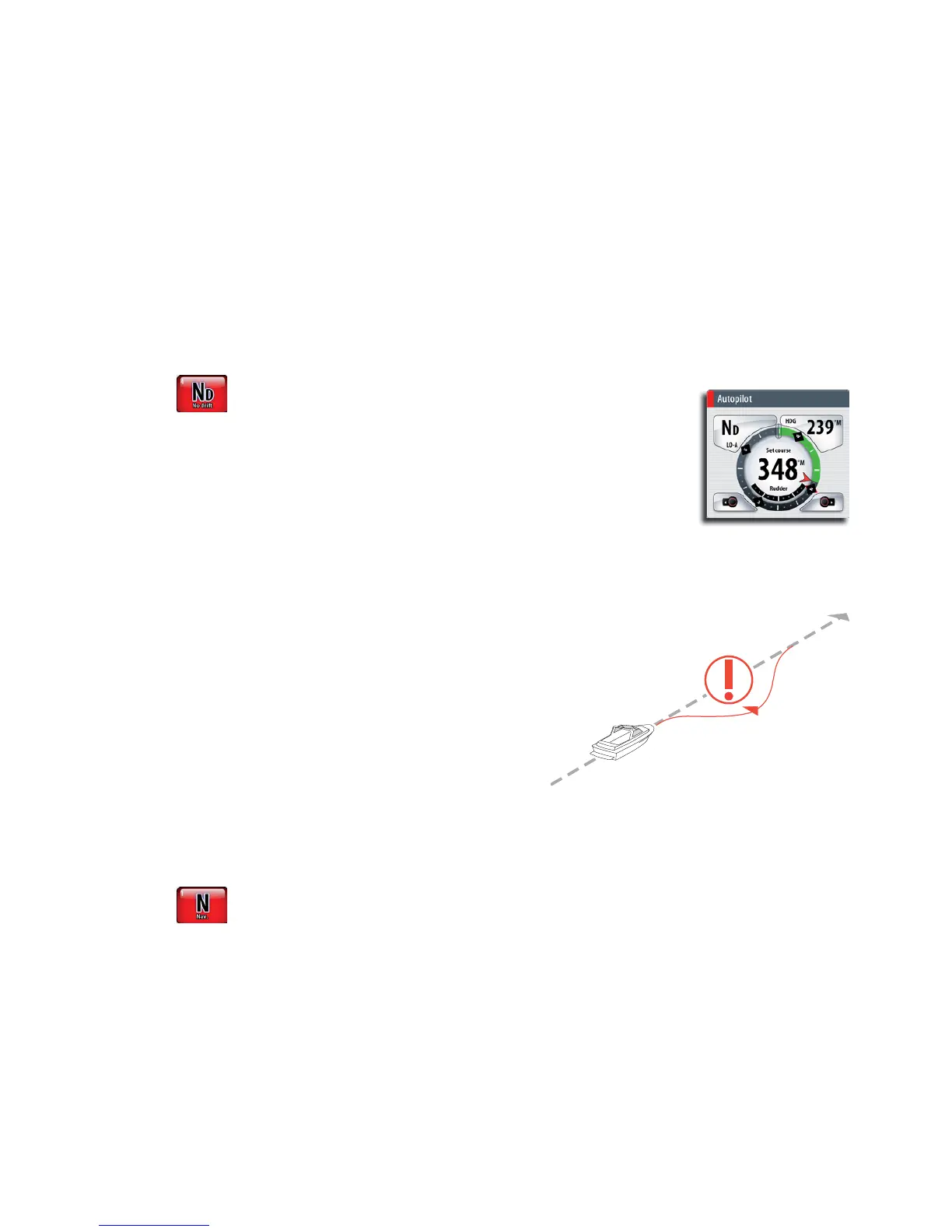
NoDrift mode
This mode combines the autopilot and the positioning
information from the GPS.
When NoDrift is activated, the autopilot will draw an invisible
bearing line based on current heading from the boat’s position.
Unlike in AUTO (compass) mode the autopilot will now use the
position information to calculate the cross track error, and
automatically keep your track straight.
You can use the arrow keys or the rotary knob to reset the bearing line while in NoDrift
mode.
Dodging
If you need to avoid an obstacle when
using NoDrift mode, you can press STBY
and power steer or use the helm until the
obstacle is passed.
If you return to NoDrift mode within 60
seconds you can select to continue on
previous set bearing line.
If you don’t respond the dialog will
disappear and the autopilot will go to
NoDrift mode with current heading as set
bearing line.
If your dodging maneuver takes more than 60 seconds, the autopilot will remain in
Standby mode.
Navigating with the NSO
You can use the autopilot feature to automatically steer the boat to a specific waypoint
location, or through a route of waypoints. The position information received from the
GPS will be used to change the course to steer to keep the boat on the track line and
direct to the destination waypoint.
To obtain satisfactory navigation steering, the following points must be fulfilled prior to
entering the NAV mode:
- The autosteering must be tested and determined satisfactory
- The GPS must be in full operating mode and transmitting position and navigation
data to the NSO
You can start navigation from any panel by pressing the GOTO key. The go to cursor
option will only be available when the cursor is active on a Chart, Radar or Echosounder
panel. For more information about navigating with the NSO refer to the Navigating
section.
You can also start navigating from the autopilot menu.