| 11
Adjusting Response Control (1-9)
The Tillerpilot will apply adjustments to the tiller, in order to
compensate for heading variations, the amount of movement
being proportional to the heading error detected by the compass
unit. The amount of movement is set by the Response Control
(sometimes referred to as the rudder ratio).
The Response Control setting can be likened to driving a motor
vehicle – at high speeds, very little wheel movement is necessary
to steer the vehicle (LOW Response). When driving at slow speeds,
more wheel movement is necessary (HIGH Response).
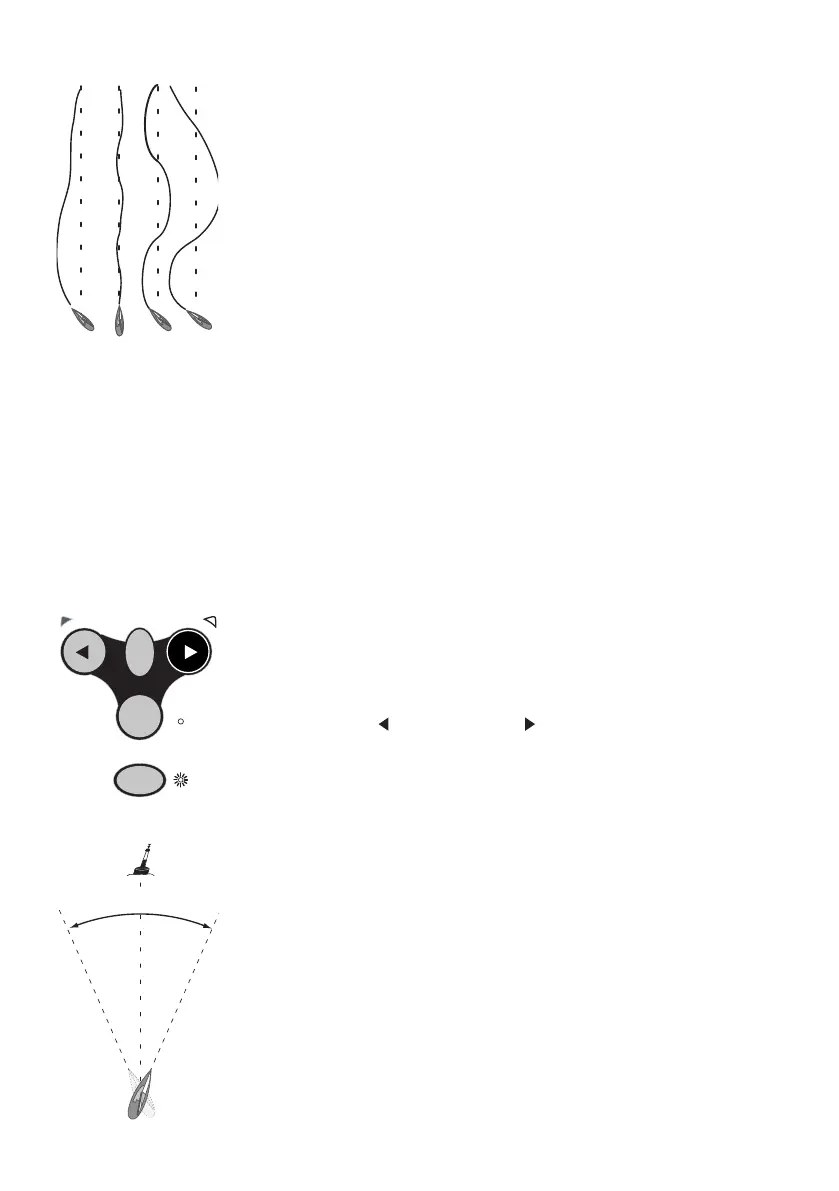
The figure shows;
- A: Response Control too low – the vessel takes a long time to
return to the correct heading.
- B: The ideal setting, where errors are quickly corrected
- C: Illustrates the effects of setting the Response Control too high,
which causes the vessel to oscillate around the correct heading
- Excessive Response (D) creates a tendency to instability of course,
leading to increasing error.
¼ Note: When Seastate is set to “On”, the response control also include
a deadband setting (see “Adjusting Seastate” below).
When Response Control is selected, the NAV LED will flash and a
repeated sequence of beeps will be heard. The number of flashes
and beeps in the sequence indicates the level of the Response
Control setting.
- Use the port (
) and starboard ( ) keys to adjust the Response
Control setting between 1 and 9
- Press NAV (CAL) to confirm settings and return to normal
operation, or press TACK to switch to Seastate adjustment.
Adjusting Seastate (On/O)
In heavy seas, more variations in heading will be detected. If
the Tillerpilot tried to respond to all of these errors, it would be
overworked, causing unnecessary strain to the unit and excessive
drain on the batteries. By setting Seastate to “On”, a deadband within
which the boat can go off course without constant corrections
being made is added. The size of the deadband is now adjusted by
the Response Control to give the best compromise between course
holding and battery consumption. When Seastate is set to “Off”, a
fixed minimum deadband applies to all response levels (1-9). See
table on next page.
A B C D
STBY
TACK
STBY
AUTO
NAV
Deadband