59
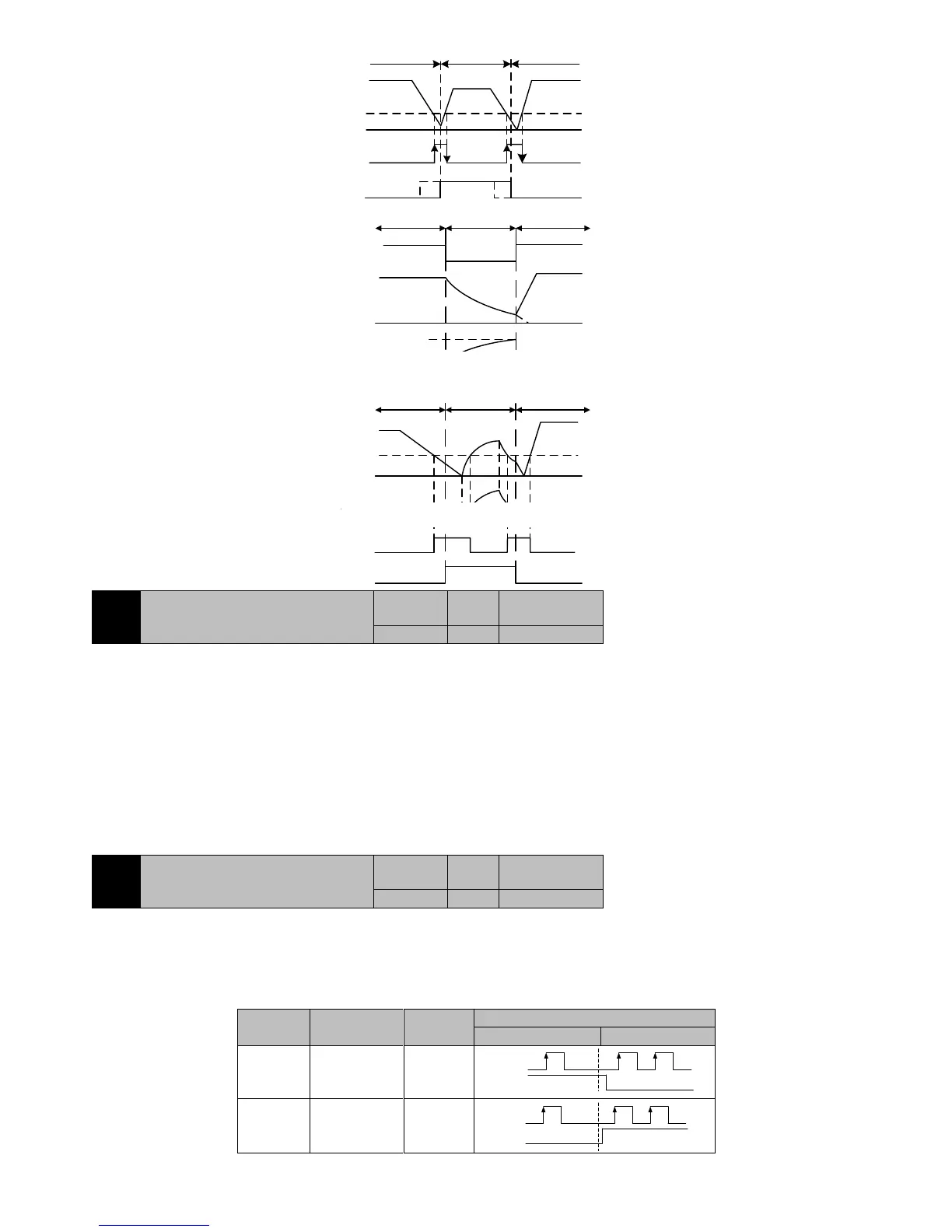
At the moment , make sure the instruction of speed and position to ensure
servo drive running correctly. During the switching between two kinds of control mode,
pay attention to switching can be running at zero speed state, but for safety,
switching control
mode when servo motor stop.From position control mode to speed control mode,
retentionpulse will be cleared.
If switch signals under the condition of higher than zero velocity rotational state,
even then velocity fall below zero speed ,also can‘t switch control mode.
Note: Although mode switching signal switch ON/OFF when zero signal is invalid,
then zero signal is valid ,it can’t switch control mode .
P1-00=4 : Torque-speed switching mode
Servo drive works in torque -speed switching mode , please set P1-00=4 and
external DI pin function code select MSEL functions.At this point , servo drive
can switch between torque control mode and speed control mode. Torque-speed
switching mode switch through external DI junction,whenever can switch
control mode,
Note: If instruction value of speed
instruction is 0 when switch speed control mode, the servo motor slowdown
in setting deceleration time to stop. If external DI signal unused MSELn
function, the drive can only run in torque control mode.
P1-00=5:Position-torque switching mode
Servo drive works in position-torque switching mode , please set P1-00=5 and
external DI pin function code select MSEL functions.At this point , servo drive
can switch between position control mode and torque control mode. It can
switch at zero speed state, but for safety, switching control mode when servo
motor stop. From position control mode to speed control mode, retentionpulse
will be cleared.
If switch signals under the condition of higher than zero velocity rotational
state, even then velocity fall below zero
speed ,also can‘t switch control mode.
NOTE: If external DI signal unused MSELn function, the drive can only run in
to position control mode.
Control mode:P
Range:0~1
Data size:16bit
Display mode:Decimal system
Parameter function:Select the source of the position command
P1-01=0:External pulse command (pt)
Position command is derived from the external input pulse number, the frequency of the external pulse determines the speed of the motor
running.
Please see the description of P1-02.
P1-01=1:Internal multiple command (pr)
Position command is derived from the internal multiple command set by the P2 group.
Please see the description of P1-03 and Section 7.3 .