86
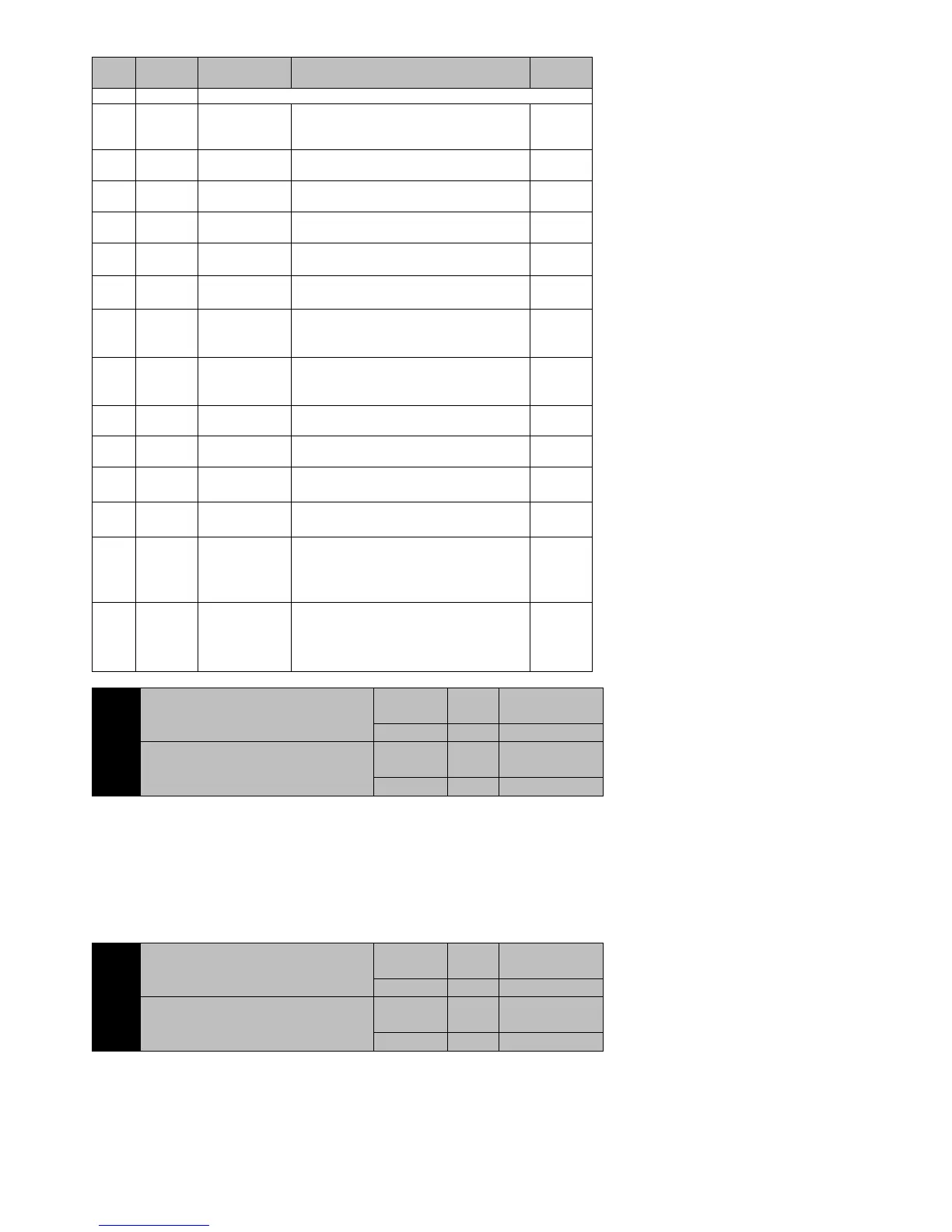
Table7-6 Digital output (DO) function definition table
Valid-SRDY, can receive S-ON instructions
Invalid-SRDY, cannot receive S-ON
instructions
Valid-release brake
Invalid-close brake
Valid-motor keep rotating
Invalid-motor stop rotating
Valid-motor speed is zero
Invalid-motor speed is not zero
Valid:when speed control, ǀ motor actual
speed-speed instruction ǀ˂P1-42 setting
Valid:when speed control, ǀ motor actual
speed-speed instruction ǀ˂P1-43 setting
Valid : when position control mode ,
positional deviation pulses˂ positioning
close to width P1-32 setting
Valid : when position control mode ,
positional deviation pulses˂ positioning
close to width P1-33 setting
Valid-motor torque is limited
Invalid-motor torque is unlimited
Valid-motor speed is limited
Invalid-motor speed is unlimited
Valid:warning event
Invalid:no warming event
Valid:fault event
Invalid:no fault event
Valid : motor output torque reach fixed
value
Invalid:motor output torque can not reach
fixed value
Valid:ZRN signal complete
Invalid:ZRN signal can not complete
Control Mode:P S T
Range:-1000~1000
Data size:16bit
Display mode:Decimal system
Parameter function:Because of the circuit, the voltage will have a certain deviation, such as when the external given to 0V, the system may be
collected the voltage 200mv. At this time can be corrected by this parameter, similar to the mechanical zero adjustment function.
If the AI1, AI2 given 0V to collect the XmV voltage, then set the P6-19/20 to X, you can eliminate the deviation.
Control Mode:P S T
Range:0~1000
Data size:16bit
Display mode:Decimal system
Parameter function:About analog value through the AI1, AI2 input is adopted the first order low-pass filter. It can reduce the external
electromagnetic interference caused by analog fluctuations. But the system response to slowly due to setting too large,.