26
3.1.2.1 Statusword
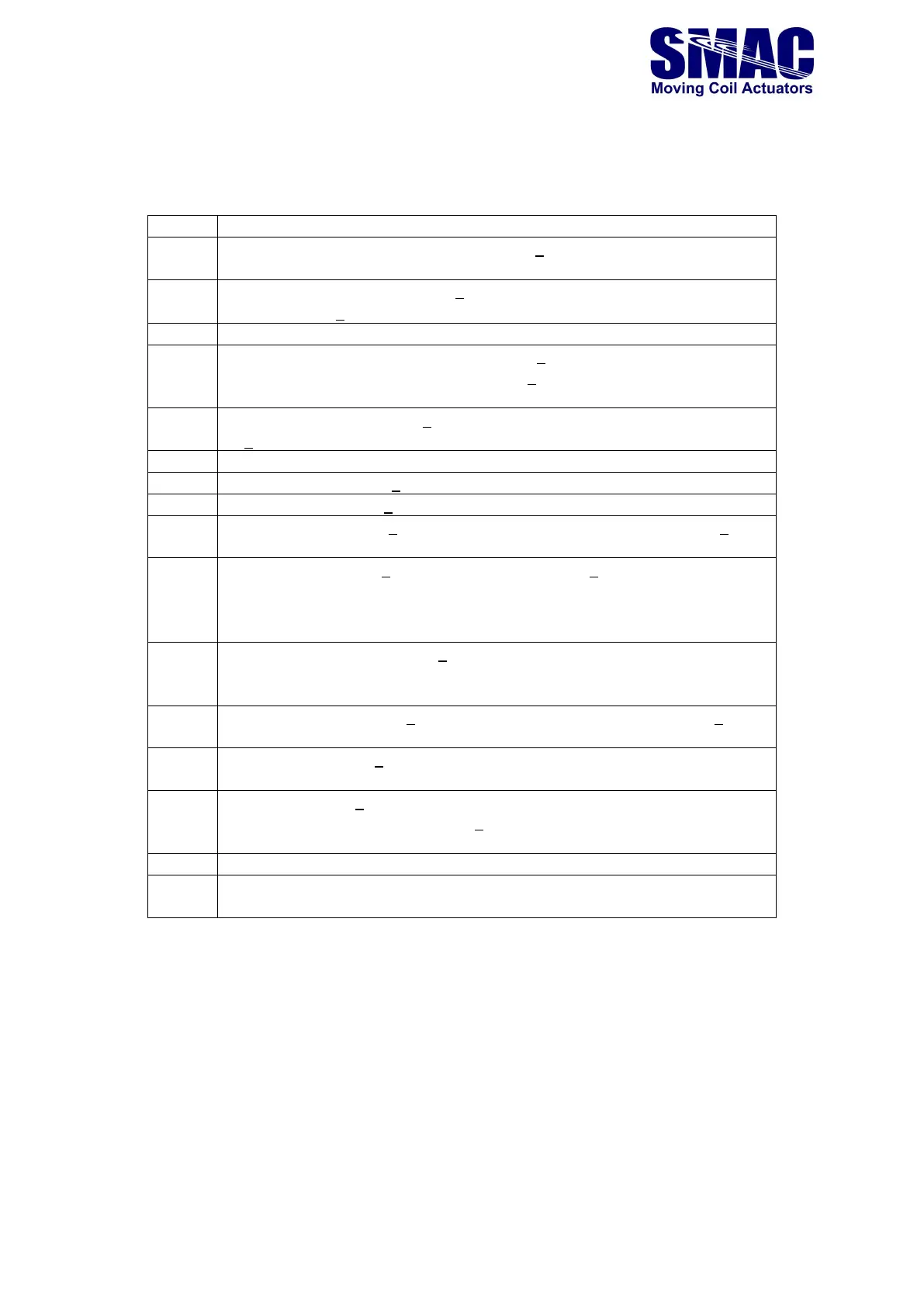
The statusword of each axis contains bits with various servo status, as described in Table 3.3.
Table 3.3. Statusword bits.
Initialization done. This will be set to 1 after VLC-2-EIP performs its
initialization process upon power-up, indicating that it is ready to be operated.
Servo enabled. This will be set to 1 when the servo is enabled by MN command.
The bit is set to 0 if servo is disabled through MF command.
Motion execution acknowledge bit. Set to 1 on a rising edge transition the
controlword “start motion” bit and set to 0 on falling edge transition of the
same controlword bit.
Trajectory complete. Set to 1 if the servo has completed a position move. Set
to 0 if the servo is busy executing a commanded move.
Homing Success. Set to 1 after homing has been completed successfully.
Homing failure. Set to 1 if homing fails.
Phasing success. Set to 1 after phasing is successfully performed. Set to 0 upon
failed phasing or at power-up.
Phasing failure. Set to 1 after a failed phasing. Set to 0 upon successful phasing
or at power-up. A failed phasing could be caused by incorrect “commutation
electrical cycle”, incorrect “phase and sense setting” or insufficient phasing
setpoint value.
Macro execution error. Set to 1 if an undefined macro is called. Set to 0 when
a new call to a defined macro is performed, or any of the mode of operation is
executed.
Macro execution. Set to 1 when a macro is being executed. Set to 0 when
macro execution has been completed.
General fault. Set to 1 in the event of overtemperature, I2T being tripped, or
STO is activated. Set to 0 otherwise, or if the fault has been successfully reset.
Servo error. Set to 1 when the following error has exceeded the acyclic variable
“Maximum following error”. Set to 0 otherwise, or if the fault reset has been
executed.
STO status. Set to 1 when STO is active (or if any of the STO inputs is not
energized). Set to 0 when STO is inactive.