Equivalent to QM2 in VLC.
Drives the actuator through a
closed loop current command.
The object “modes of operation display” follows the “modes of operation” value, such mechanism
can be used as a handshake for control purposes.
The object “Macro call indicator” shows the macro number being executed during a servo move
and during the execution of a macro based on the “macro call” object.
3.2 Executing motion through servo objects
The following are the steps to execute motion corresponding to one of the modes of operation:
➢ Configure the acyclic servo objects (Table 3.1) that are necessary for the selected mode of
operation.
➢ Set the object “Modes of operation” to the desired value.
➢ Set the cyclic output objects required for the modes of operation as desired, for instance,
to execute a position move, “Profile velocity”, “Profile acceleration” and “Setpoint” need
to be set to the desired values.
➢ Set controlword to 1 (given the previous value is other than 1). This will start the motion.
➢ Bit 3 of statusword will be set to 1 after the above to indicate the motion has been started.
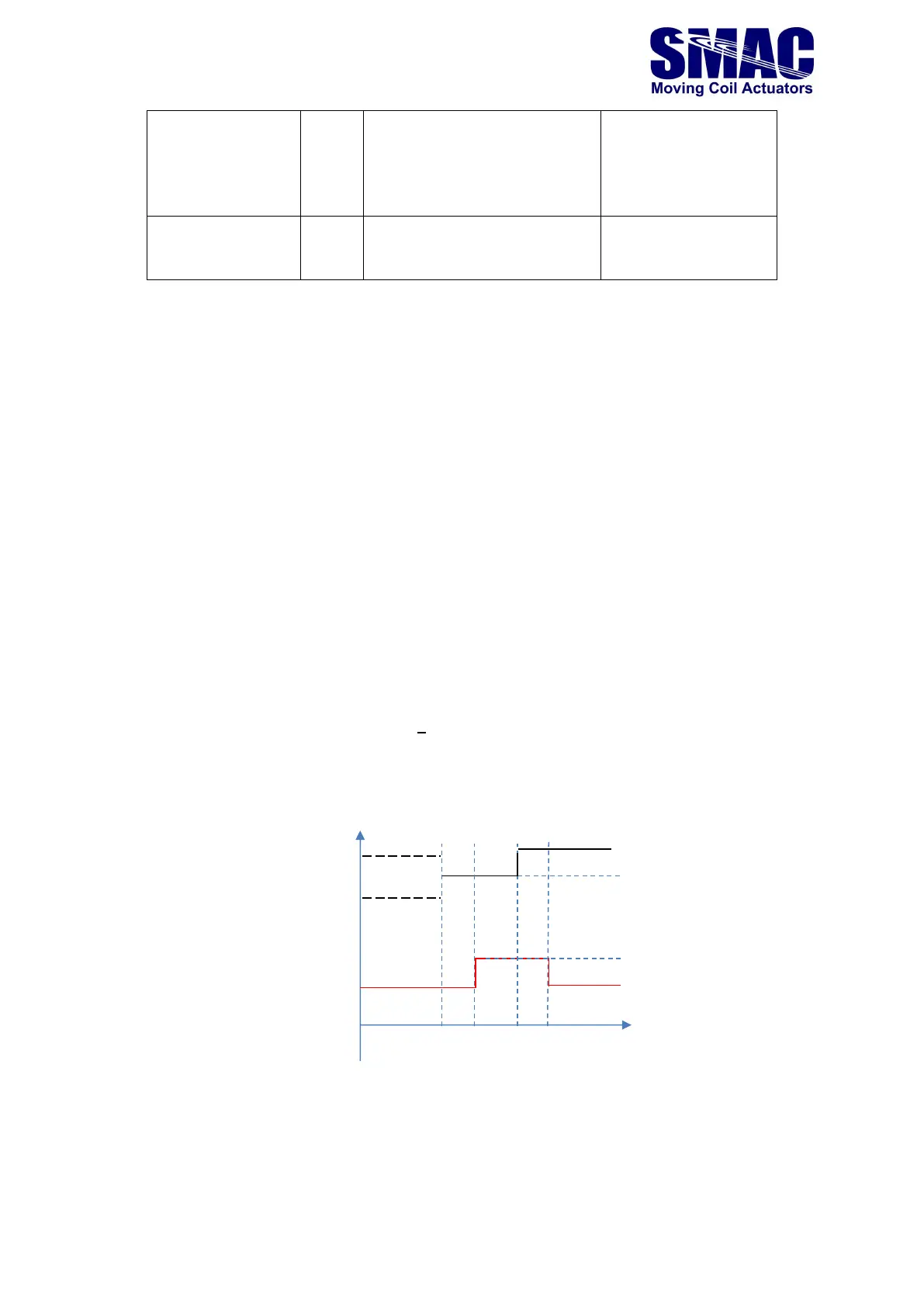
➢ Set controlword to another value (except those in Table 3.4), for instance 10, this
will be responded by bit 3 of statusword, as shown Figure 3.1.
Figure 3.1. Controlword and statusword handshake mechanism.