27
3.1.2.2 Controlword
For each axis, the controlword value represents a certain servo function, as described in Table
3.4.
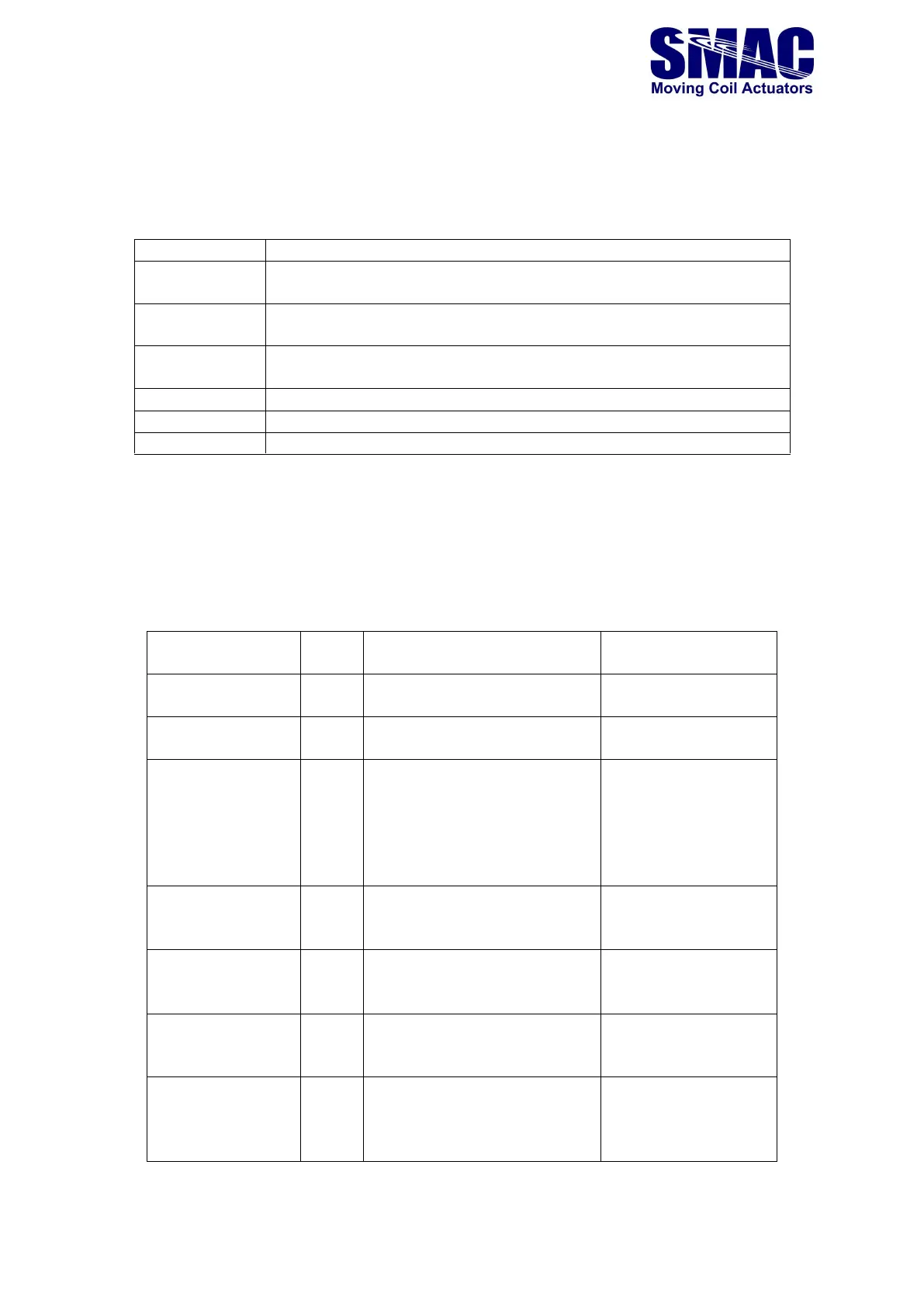
Table 3.4. Controlword value.
Terminates a macro execution (e.g. phasing/homing/user-defined
macro) and turns off servo.
Start motion/macro call. Starts the execution of motion based on the
selected mode of operation or executes a macro call.
Stop motion. Motion is terminated (for modes of operation 1, 2, 3) and
servo is held in its position. Refer to Table 7, mode of operation details.
Motor off. Servo is turned off.
Motor on. Servo is enabled.
Fault reset. Resets any of the VLC faults.
3.1.2.3 Modes of operation
For each axis, there are nine servo modes of operation, for which the object “setpoint” has a
dependent function, as described in table 3.5.
Table 3.5. Modes of operation for each axis.
Equivalent to PM,MA in VLC.
Absolute target
position value
Equivalent to PM,MR in VLC.
Relative target
position value
Target velocity value.
Can be either positive
or negative, unlike in
the case of VM in VLC,
where direction has to
be set through DI.
Equivalent to QM0 in VLC.
Drives the actuator through an
open loop voltage command.
Same as SQ value in QM
mode.
Equivalent to QM1 in VLC.
Drives the actuator through a
closed loop current command.
Same as SQ value in
QM1 mode.
Performs homing. See
subsection 3.1.1.1 for more
information.
Performs phasing for 3-phase
(brushless) actuators/motors.
See subsection 3.1.1.2 for more
information.