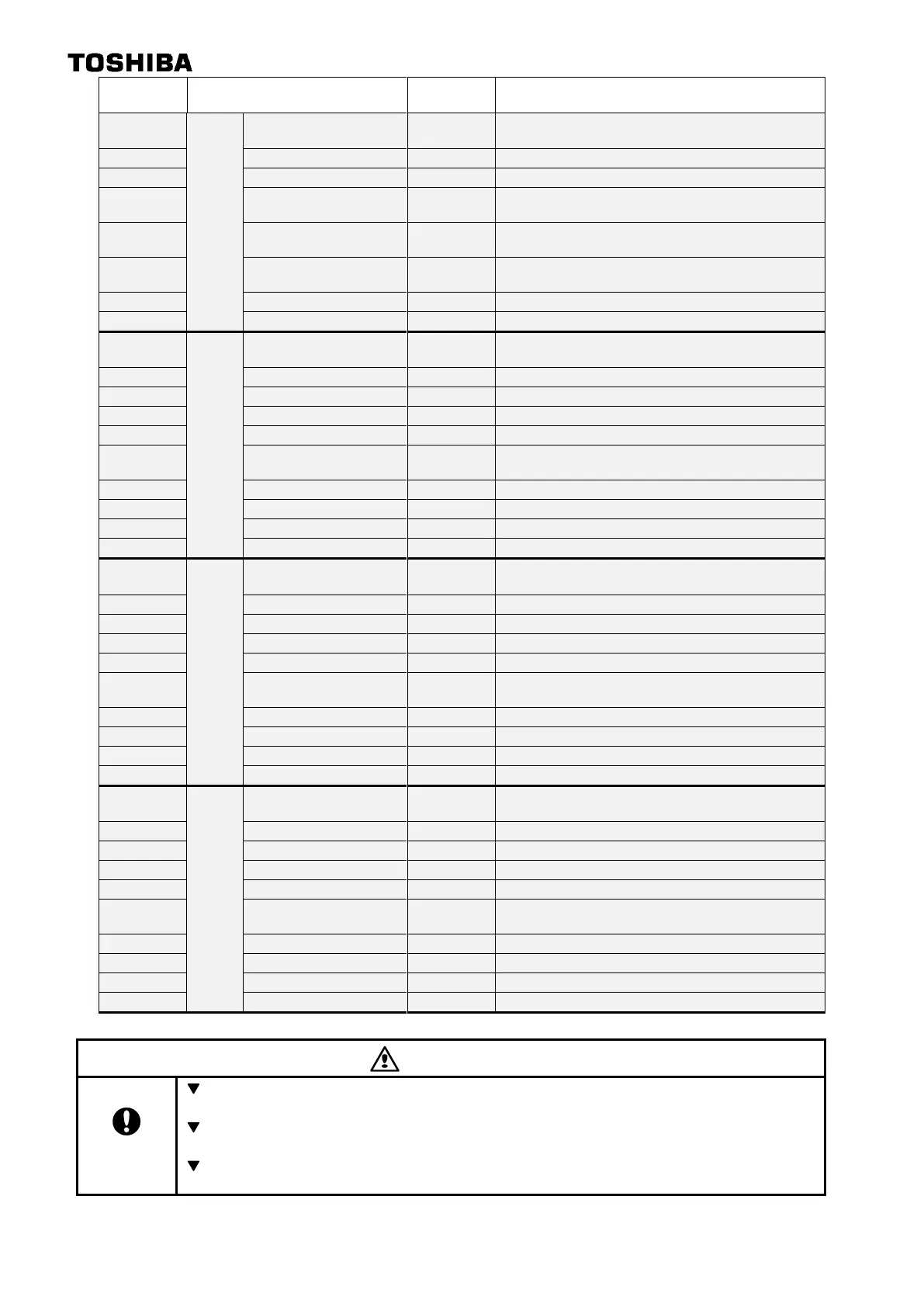
0x1600 subidx 02 Command Index No.
0x6042: vl target velocity
0x1600 subidx 03 Command Index No.
0x1600 subidx 04 Command Index No.
Number of monitor
objects
0x1A00 subidx 00 Transmit PDO1
assignment: Number of objects assigned
0x1A00 subidx 01 Monitor Index No.
0x6041: vl Statusword
0x1A00 subidx 02 Monitor Index No.
0x6044: vl velocity actual value
0x1A00 subidx 03 Monitor Index No.
0x1A00 subidx 04 Monitor Index No.
Number of command
objects
0x1601 subidx 00 Receive PDO2
assignment: Number of objects assigned
0x1601 subidx 01 Command Index No.
0x1601 subidx 02 Command Index No.
0x1601 subidx 03 Command Index No.
0x1601 subidx 04 Command Index No.
Number of monitor
objects
0x1A01 subidx 00 Transmit PDO2
assignment: Number of objects assigned
0x1A01 subidx 01 Monitor Index No.
0x1A01 subidx 02 Monitor Index No.
0x1A01 subidx 03 Monitor Index No.
0x1A01 subidx 04 Monitor Index No.
Number of command
objects
0x1602 subidx 00 Receive PDO3
assignment: Number of objects assigned
0x1602 subidx 01 Command Index No.
0x1602 subidx 02 Command Index No.
0x1602 subidx 03 Command Index No.
0x1602 subidx 04 Command Index No.
Number of monitor
objects
0x1A02 subidx 00 Transmit PDO3
assignment: Number of objects assigned
0x1A02 subidx 01 Monitor Index No.
0x1A02 subidx 02 Monitor Index No.
0x1A02 subidx 03 Monitor Index No.
0x1A02 subidx 04 Monitor Index No.
Number of command
objects
0x1614 subidx 00 Receive PDO21
assignment: Number of objects assigned
0x1614 subidx 01 Command Index No.
0x1614 subidx 02 Command Index No.
0x1614 subidx 03 Command Index No.
0x1614 subidx 04 Command Index No.
Number of monitor
objects
0x1A14 subidx 00 Transmit PDO21
assignment: Number of objects assigned
0x1A14 subidx 01 Monitor Index No.
0x1A14 subidx 02 Monitor Index No.
0x1A14 subidx 03 Monitor Index No.
0x1A14 subidx 04 Monitor Index No.
Set up “Communication error trip function (c100 ~ c103)” to stop the drive when
CANopen communication is deactivated.
When CANopen state is “OPERATIONAL”, the CANopen communication parameters
can not be changed. Set the CANopen state to “PRE-OPERATIONAL.”.
When the parameters are changed, the power must be cycled to the drive for the
changes to take effect.

 Loading...
Loading...











