INTERFACE MANUAL
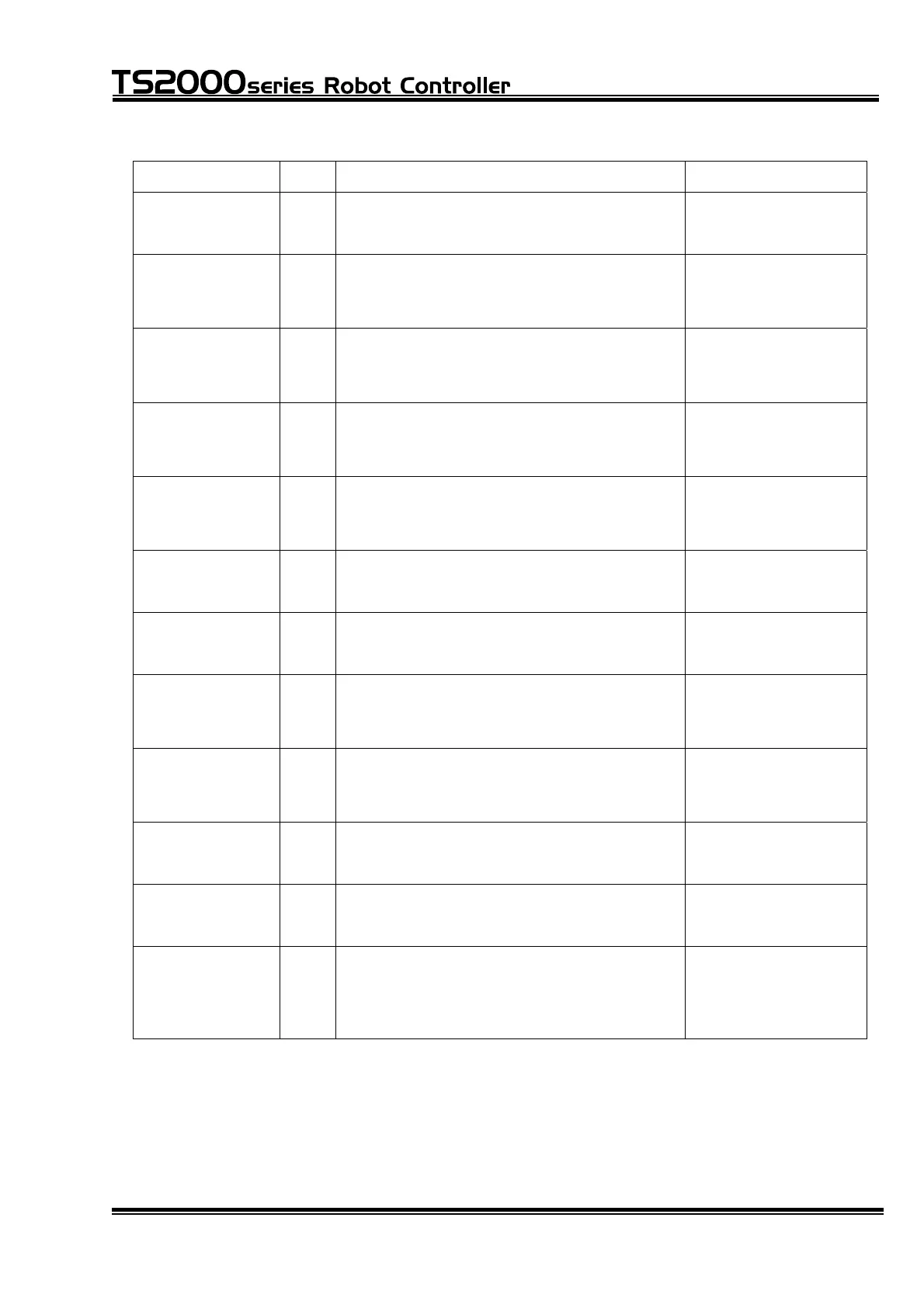
Name I/O Function Signal judgment
EMS*B
~ EMS*C
I Emergency-stops the robot. ON: Open
OFF: Short-circuit
ACK O Serves as a response signal to input
signals STROBE, PRG_RST,
STEP_RST, CYC_RST and DO_RST.
ON: High
OFF: Low
TEACH O This signal is output when the robot arm
can be guided through the teach
pendant.
ON: High
OFF: Low
SV_RDY O This signal is output when the servo
power is turned on and the robot is
ready to start.
ON: High
OFF: Low
EXTSIG O This signal is output when the EXT.
SIGNAL mode is selected by means of
the MODE switch.
ON: High
OFF: Low
SYS_RDY O System ready signal ON: High
OFF: Low
AUTORUN O This signal is output while the program is
executed in automatic operation.
ON: High
OFF: Low
CYC_END O This is the output signal for verifying that
the program has stopped by the CYCLE
signal input.
ON: High
OFF: Low
LOW_ST O This signal is output while the robot is
operating at a low speed by the input of
low speed command.
ON: High
OFF: Low
BT_ALM O Battery voltage level error output for
backup power supply.
ON: High
OFF: Low
ALARM O Controller fault output. ON: High
OFF: Low
SVST_A
~ SVST_B
O Servo power ON contact output. ON: Contact close
OFF: Contact open
Non-voltage contact
STE 71367
– 111 –

 Loading...
Loading...





