12
8003-force_control.cc
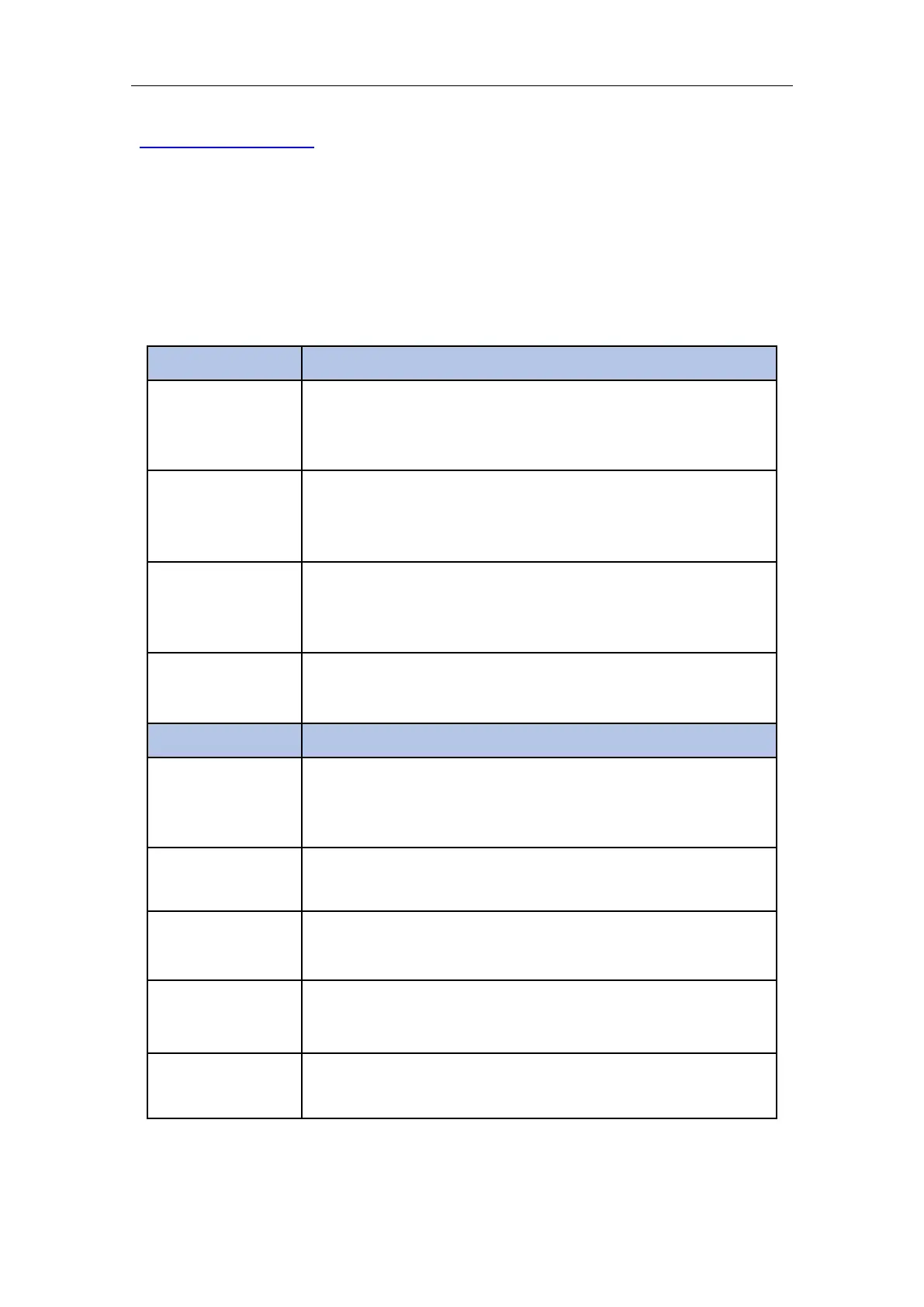
5. 6 Axis Force Torque Sensor Error Code
Six-axis Force Torque Sensor Error
Please check the sensor error code, locate the problem, and power on
again. If it cannot be resolved, please contact technical support.
Six-axis Force Torque Sensor Mode Setting Error
Please make sure that the robotic arm is not in Manual Mode, check
whether the given value of this command is 0/1/2
Six-axis Force Torque Sensor Zero Setting Error
Please check the sensor communication wiring and whether the power
is normal.
Six-axis Force Torque Sensor Overload
Please reduce the payload or applied external force.
Six-axis Force Torque Sensor Communication Failure
Please check whether the wire between the Data Collector and the
Six-axis Force Torque Sensor is connected properly
The Data detected by the Six-axis Force Torque Sensor is Abnormal
Please contact technical support
Six-axis Force Torque Sensor X-direction Torque Exceeds Limit
Please reduce the force applied in the X direction
Six-axis Force Torque Sensor Y-direction Torque Exceeds Limit
Please reduce the force applied in the Y direction
Six-axis Force Torque Sensor Z-direction Torque Exceeds Limit
Please reduce the force applied in the Z direction
 Loading...
Loading...






