기구 설명 / M ECHANICAL DESCRIPTION
1. 상축․침봉기구 / Upper shaft and deedle bar mechanism
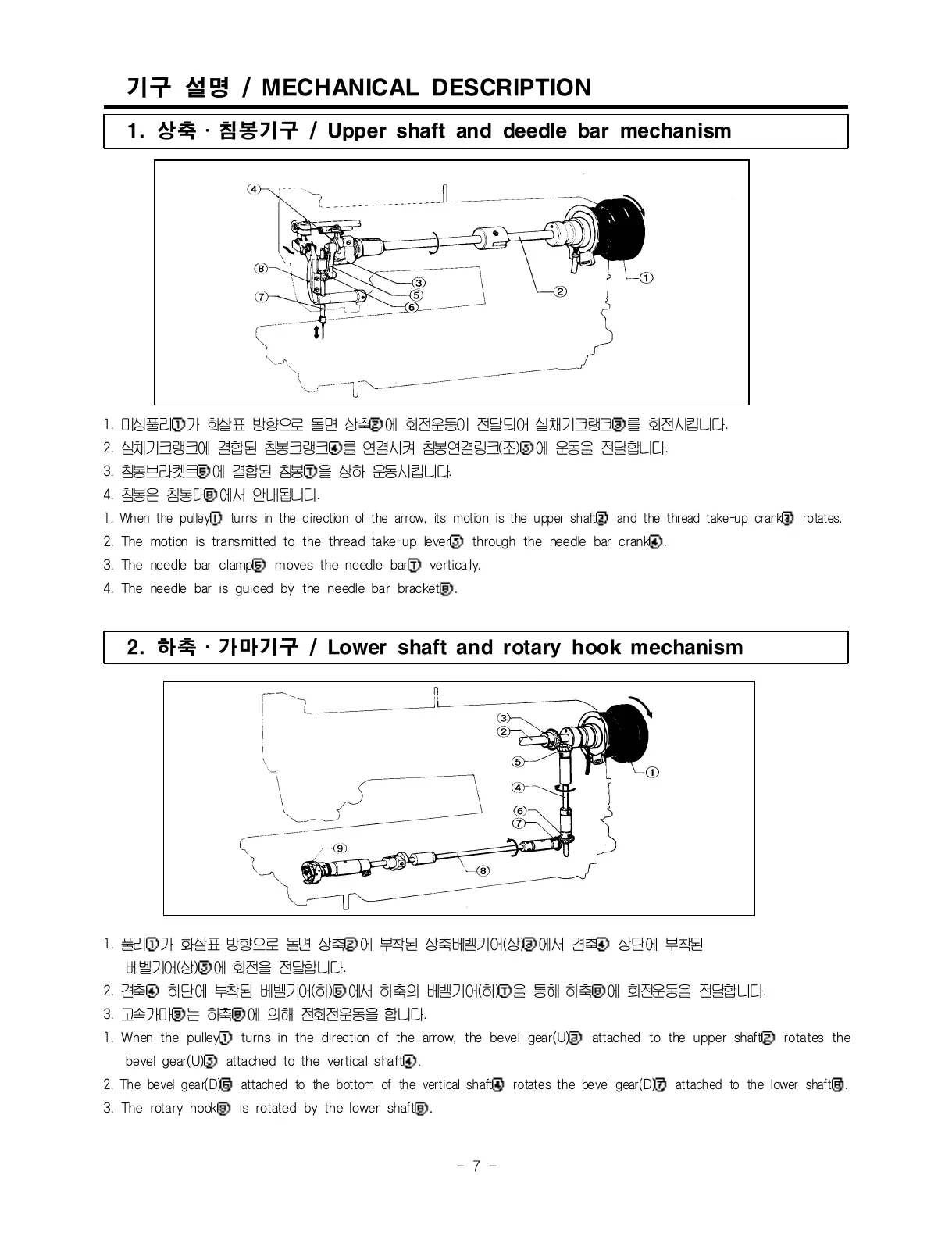
1. 미싱풀리①가 화살표 방향으로 돌면 상축②에 회전운동이 전달되어 실채기크랭크③를 회전시킵니다.
2. 실채기크랭크에 결합된 침봉크랭크④를 연결시켜 침봉연결링크(조)⑤에 운동을 전달합니다.
3. 침봉브라켓트⑥에 결합된 침봉⑦을 상하 운동시킵니다.
4. 침봉은 침봉대⑧에서 안내됩니다.
1.
Wh en the pul le y① turns in the dire ction of the arrow, its motion is the upper shaft② and the thread take-up crank③ rotates.
2. The motion is transmitted to the thread take-up lever⑤ through the needle bar crank④.
3. The needle bar clamp⑥ moves the needle bar⑦ vertically.
4. The needle bar is guided by the needle bar bracket⑧.
2. 하축․가마기구 / Lower shaft an d rotary hook mechanism
1. 풀리①가 화살표 방향으로 돌면 상축②에 부착된 상축베벨기어(상)③에서 견축④ 상단에 부착된
베벨기어(상)⑤에 회전을 전달합니다.
2. 견축④ 하단에 부착된 베벨기어(하)⑥에서 하축의 베벨기어(하)⑦을 통해 하축⑧에 회전운동을 전달합니다.
3. 고속가마⑨는 하축⑧에 의해 전회전운동을 합니다.
1. When the pulley① turns in the direction of the arrow, the bevel gear(U)③ attached to the upper shaft② rotates the
bevel gear(U)⑤ attached to the vertical shaft④.
2.
The bevel gear(D)⑥ attached to the bottom of the vertical shaft④ rotate s the be vel g ear(D)⑦ attached to the lower shaft⑧.
3. The rotary hook⑨ is rotated by the lower shaft⑧.
 Loading...
Loading...

