2. Dual Robot Calibration
Figure 2.13: Manual enter IP address
2.6 Before starting
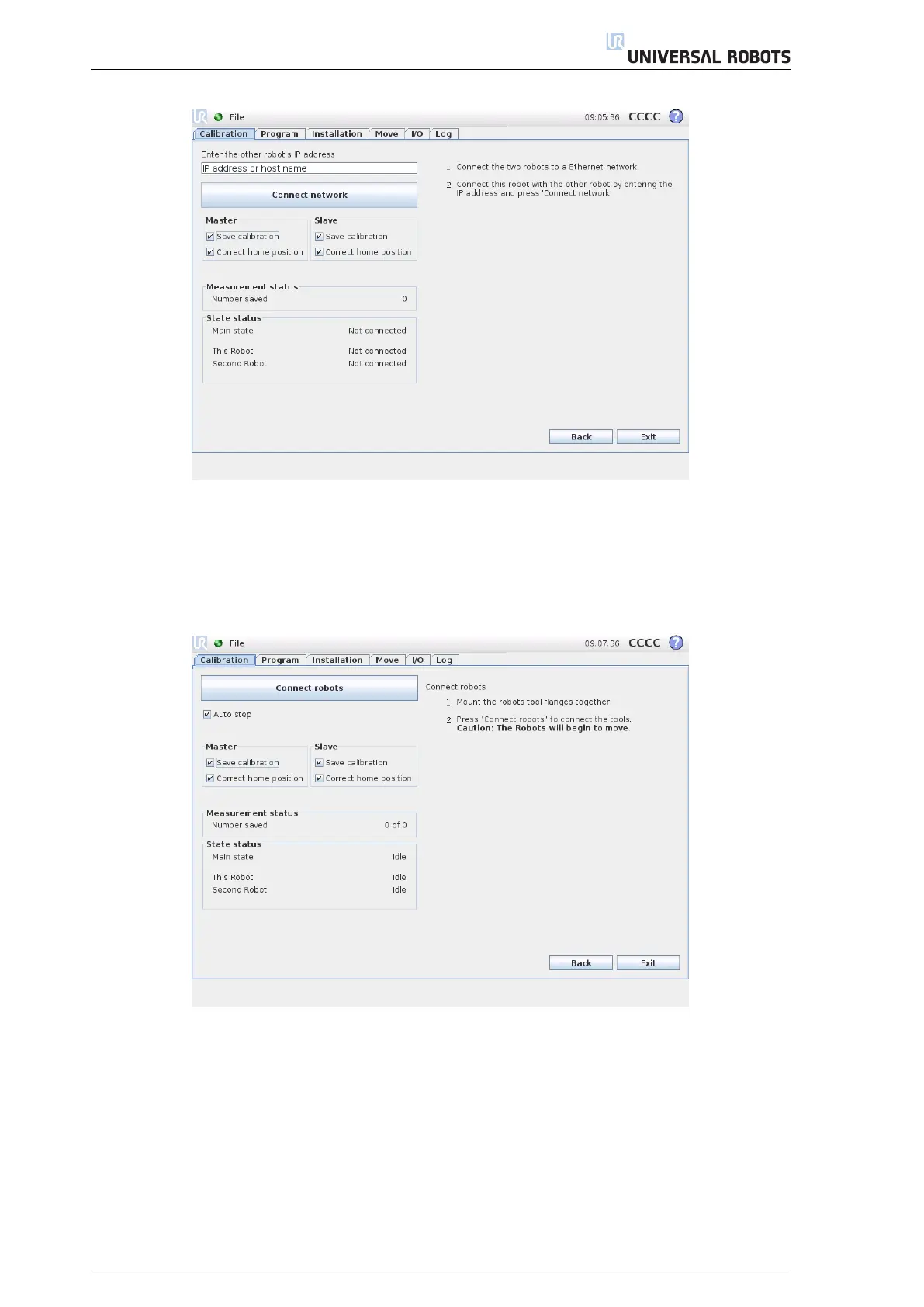
The steps through the calibration are by default done automatically, unless it needs help from an operator.
This can be disabled by the Auto step checkbox, see Figure 2.14.
Figure 2.14: Calibration options
Furthermore, It is optional to save and correct the home position of each robot, which can be relevant if
only one of the robots need to be calibrated. However it is by default enabled.
Save calibration - means that the calculated kinematic calibration is applied and saved on the robot
Correct home position
- means that it estimates and sets the home position using the calibration
(define new joint offset angles).
8