3. Program Correction by Key-waypoints
Figure 3.6: Press "Change this waypoint" to redefine the configuration for this waypoint.
(7) This leads to the "Move" tab. Move the robot to the new position and press "OK".
3.3.1 Corresponding Tool Position
To help the method, it is important to adjust the Corresponding Tool Position (CTP) which is the offset from
the endpoint of the robot with or without e.g. picked objects. Examples of typical CTP locations:
• The tool center point where the robot is going to pick an object.
• The end location of the object where the object is going to be placed.
This value is used in the process that redefines the waypoint. The CTP can be defined individually for
each key-waypoint which improves the accuracy of the correction. The selected Tool Center Point (TCP) from
the program installation is used as default.
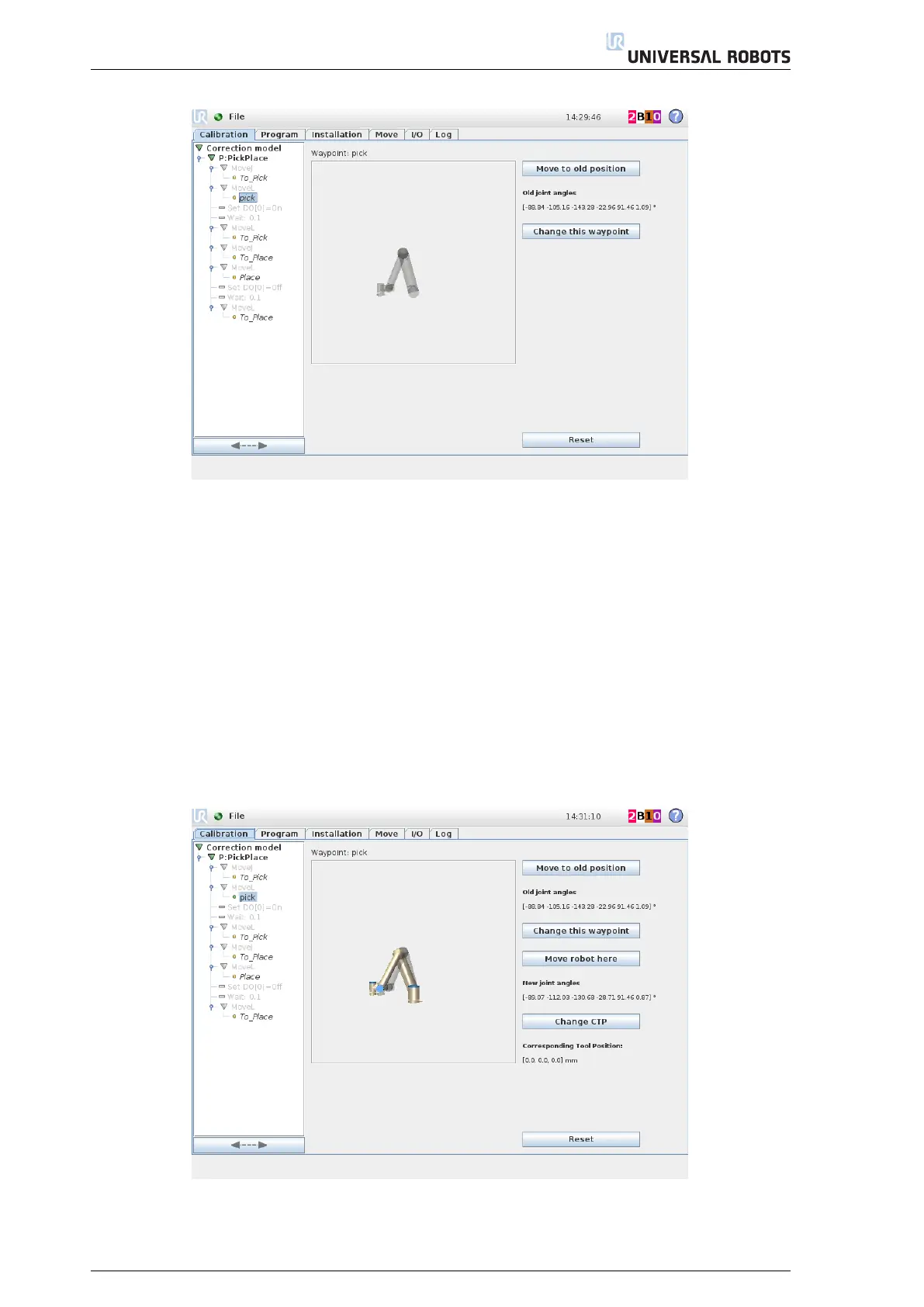
(8) Specify the Corresponding Tool Position by pressing "Change CTP":
Figure 3.7: Press "Change CTP" and change the Corresponding Tool Position.
(9) Change the CTP coordinates and press OK:
18