3. Program Correction by Key-waypoints
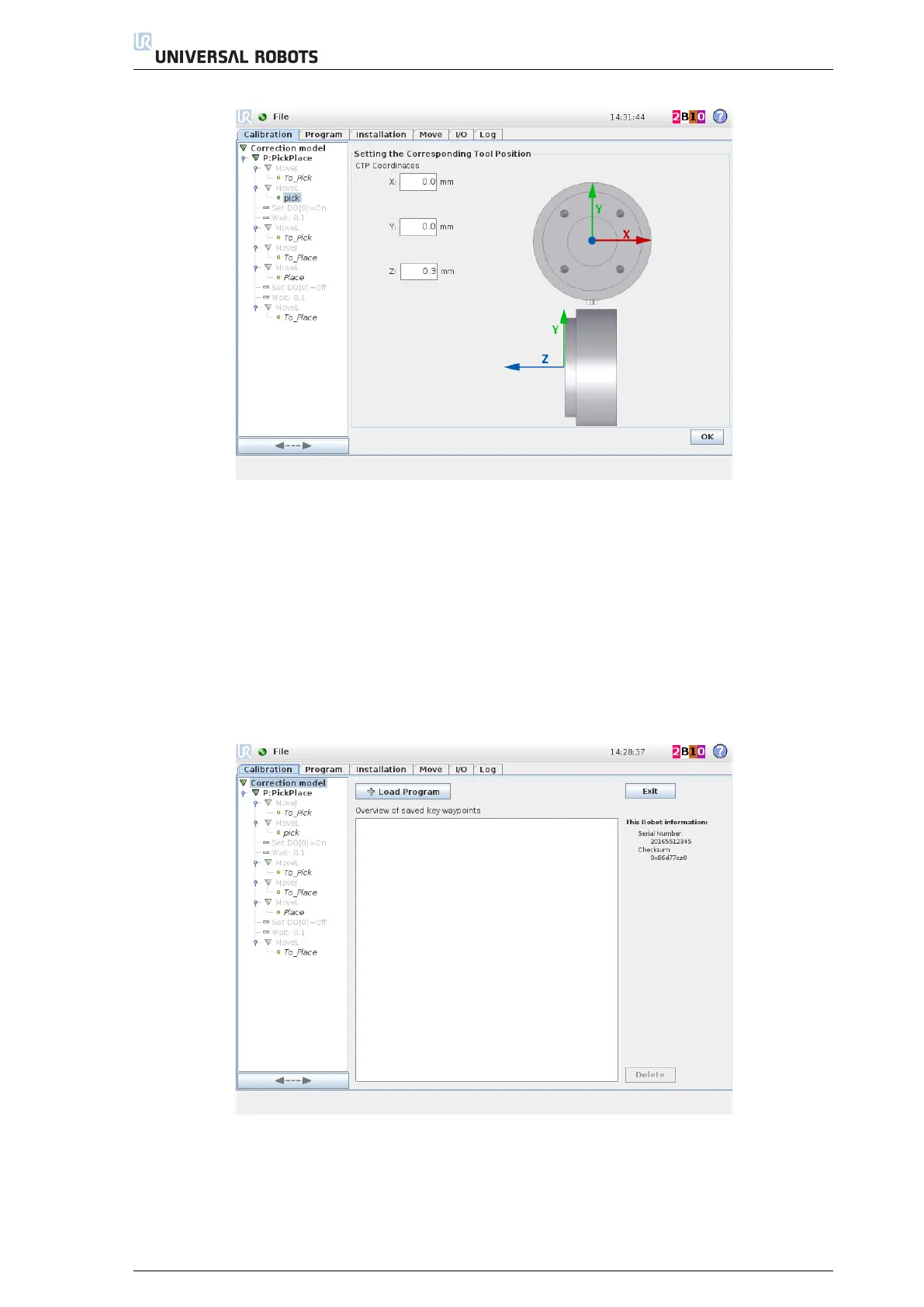
Figure 3.8: Change the CTP coordinates and press OK
(10)
This completes redefining the "pick" key-waypoints. In the program three, the reteached waypoint is
no longer displayed in italics and the icon is now the one for a defined waypoint. Continue by repeating
step 5 to 9 until all key-waypoints are redefined.
3.3.2 Waypoints from Multiple Programs
It is possible to add key-waypoints from multiple programs. This is done by adding additional programs and
afterwards select and redefine as previously described in step 4 to 10.
(11)
If the key-waypoints are distributed over multiple programs, select the root node of the program tree
and press "Load Program" and repeat from step 4:
Figure 3.9: Add an additional program by pressing "Load Program" and repeat from step 4.
3.4 Handling Key-waypoints
An overview of the redefined key-waypoints is shown when selecting the "Correction model" node, see
Figure 3.10. The key-waypoints are grouped by the source robot’s relationship to this robot and installation.
19