3. Program Correction by Key-waypoints
3.3 Redefine Key-waypoints
The program used in this tutorial is a simple pick and place program with two key-waypoints, the waypoint
for the pick and place positions.
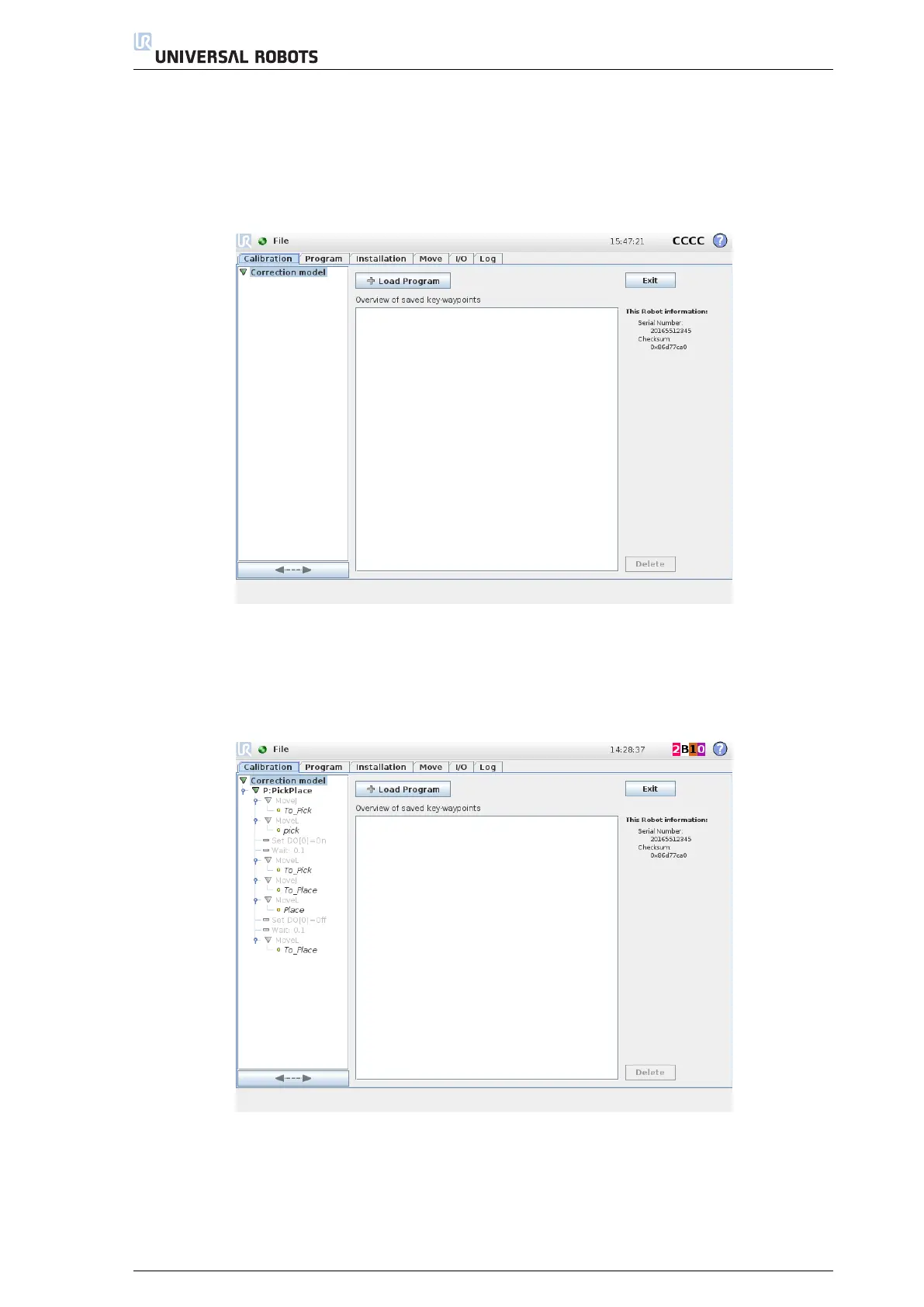
(4) The chosen program can now be loaded by pressing "Load Program":
Figure 3.4: Press "Load Program" to import a program.
(5)
Select one of the decided key-waypoints in the program. In the program tree, waypoints that are not
reteached are displayed in italics and with the undefined waypoint icon. The waypoint called "pick" is
selected:
Figure 3.5: Select one of the key-waypoints. In this case waypoint named "pick"
(6) Press "Change this waypoint" to redefine the configuration for the selected waypoint:
17