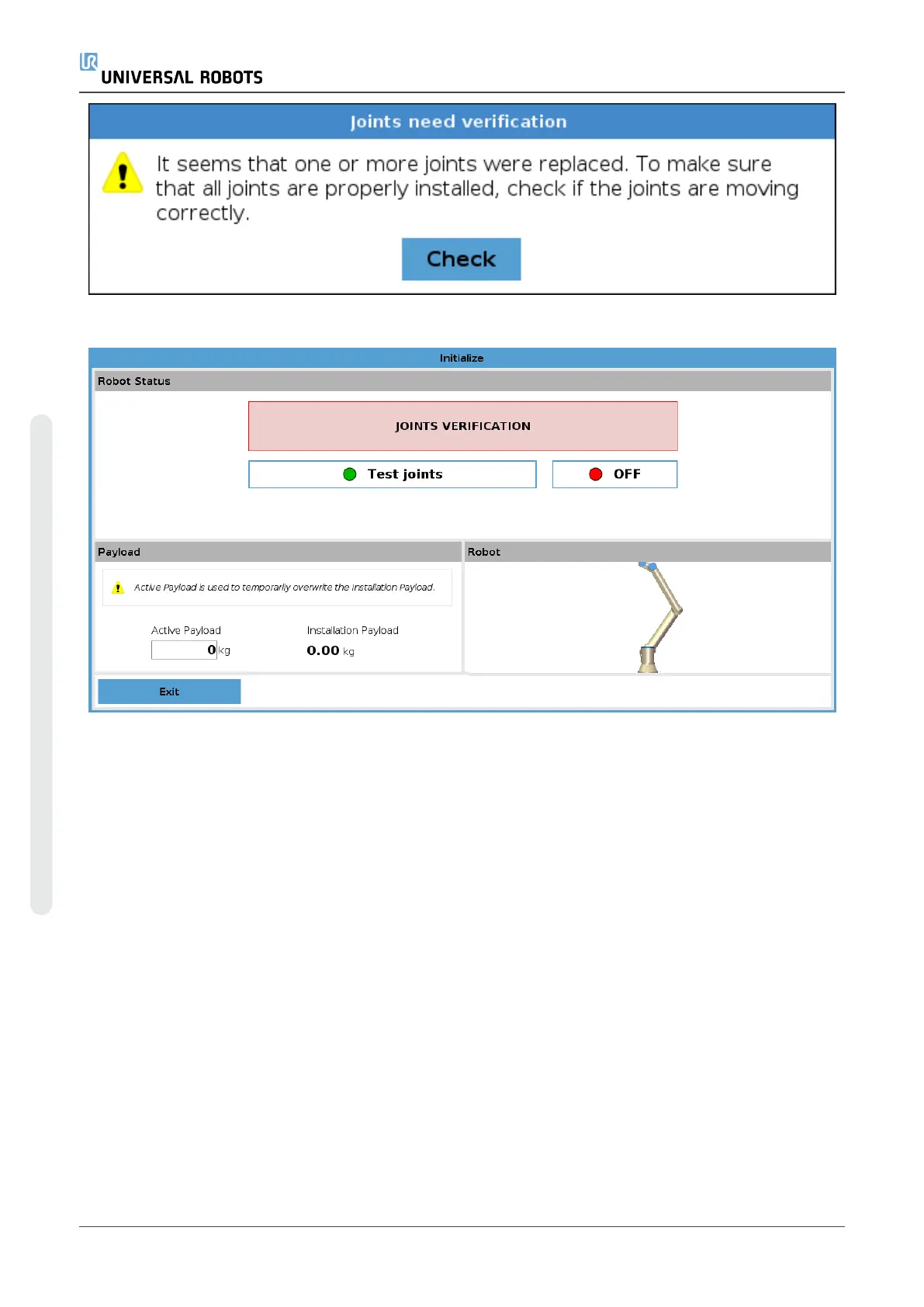
3. Press Test Joints to start joint verification.
4. Move all joints with the arrows respective to each joint.
1. If joints move as expected, press Valid and a popup appears. Follow the popup
instructions.
2. If joints did not move as expected (i.e., wrong joint moves or incorrect direction), press
Failed and a popup appears. Follow the popup instructions.
e-Series 40 Service Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.