4.2.7. Screw Connection
The following two sections describe how to disassemble and assemble a joint with a screw-
connection.
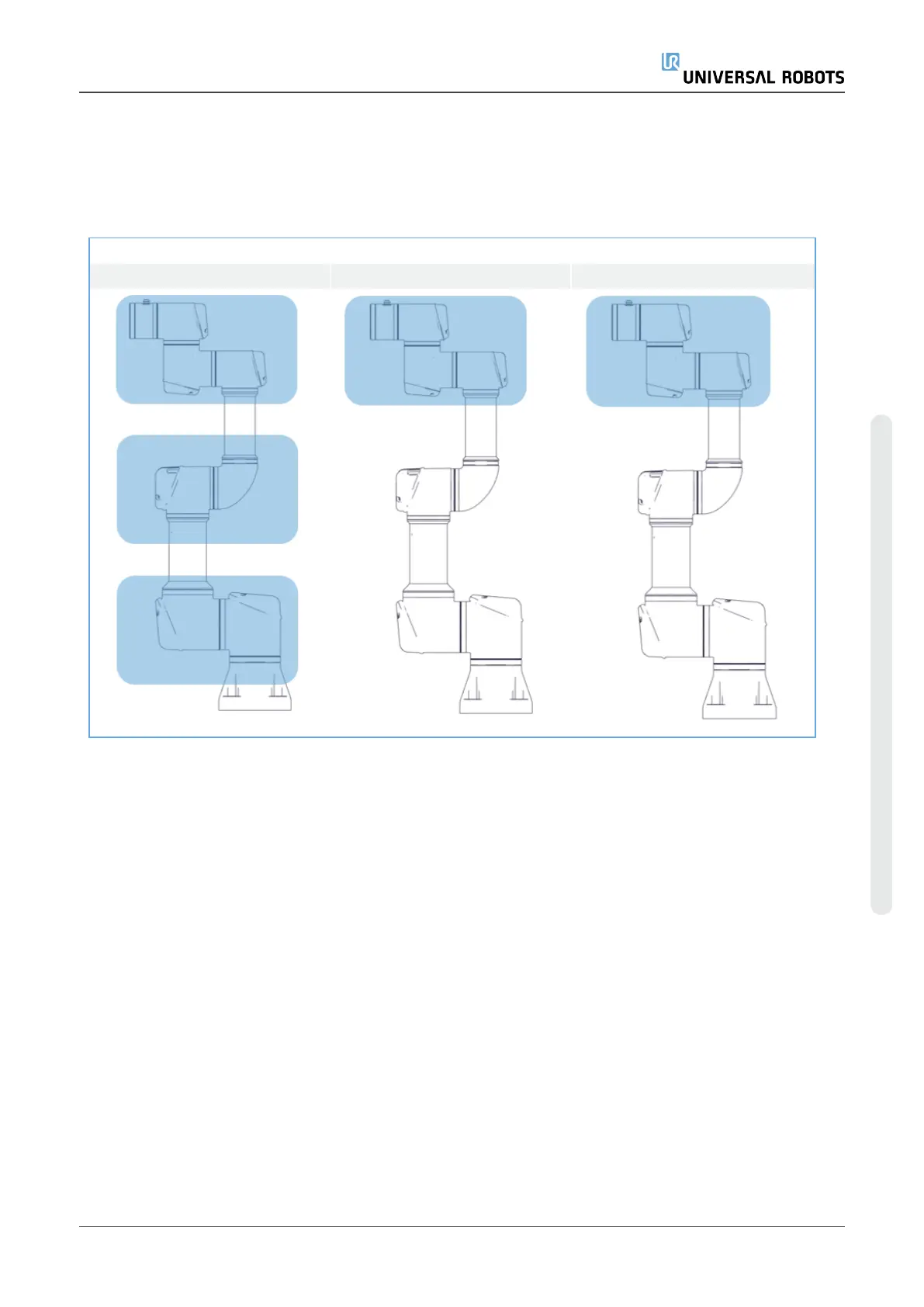
Screw connection location
UR3e UR5e UR10e and UR16e
Disassembling Screw Connection
1. Remove the screws in the blue lid, then remove the blue lid as shown in Section General
Guidance to Separate Joint from Counterpart
2. Gently remove the power and communications wires from the terminals as shown in Section
Power and Communication Connector Types on the Joint and Connector Location on joints.
Service Manual 31 e-Series
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.