Joint Torque
Limit
Exceeding the internal joint torque limit (each joint) results in a Cat 0
3
. This is not
accessible to the user; it is a factory setting. It is NOT shown as an e-Series safety
function because there are no user settings and no user configurations.
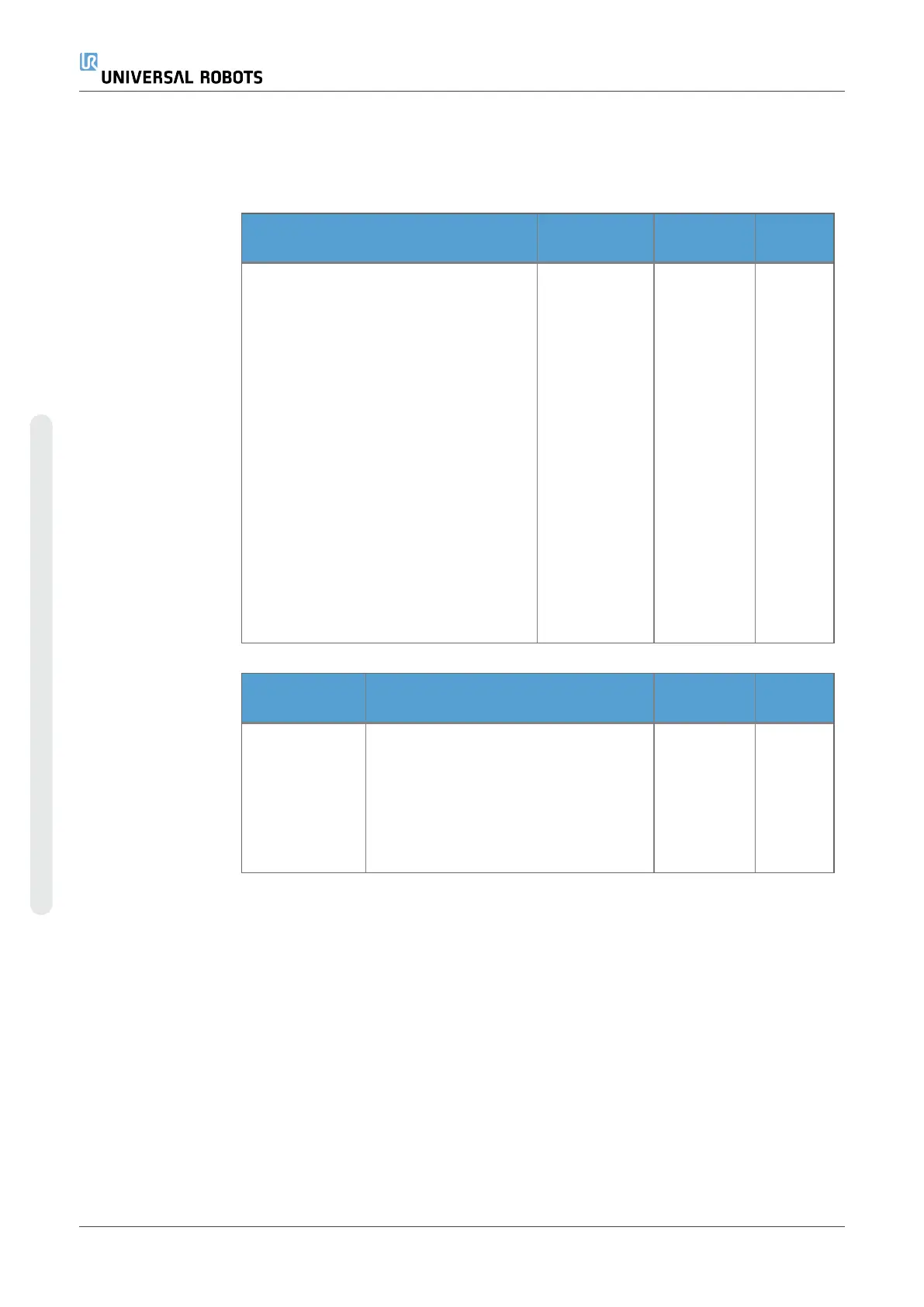
SF5 Called
various names:
Pose Limit, Tool
Limit, Orientation
Limit, Safety
Planes, Safety
Boundaries
Description
What
happens?
Tolerance
and PFH
D
Affects
Monitors the TCP Pose (position and
orientation) and will prevent exceeding a
safety plane or TCP Pose Limit. Multiple
pose limits are possible (tool flange,
elbow, and up to 2 configurable tool
offset points with a radius) Orientation
restricted by the deviation from the
feature Z direction of the tool flange OR
the TCP. This safety function consists of
two parts. One is the safety planes for
limiting the possible TCP positions. The
second is the TCP orientation limit, which
is entered as an allowed direction and a
tolerance. This provides TCP and wrist
inclusion/ exclusion zones due to the
safety planes.
Will not allow
motion to
exceed any
limit settings.
Speed or
torques could
be reduced so
motion will not
exceed any
limit. A robot
stop will be
initiated to
prevent
exceeding any
limit. Will not
allow motion
to exceed any
limit settings.
Tol: 3° 40
mm
PFH
D
: 1.8E-
07
TCP
Tool
flange
Elbow
SF6 Speed Limit
TCP & Elbow
Description What happens?
Tolerance
and PFH
D
Affects
Monitors the
TCP and elbow
speed to
prevent
exceeding a
speed limit.
Will not allow motion to exceed any limit
settings. Speed or torques could be
reduced so motion will not exceed any
limit. A robot stop will be initiated to
prevent exceeding any limit. Will not
allow motion to exceed any limit
settings.
Tol:50 mm/s
PFH
D
: 1.8E-
07
TCP
UR10e 102 User Manual
15.Safety Functions Table 1
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...











