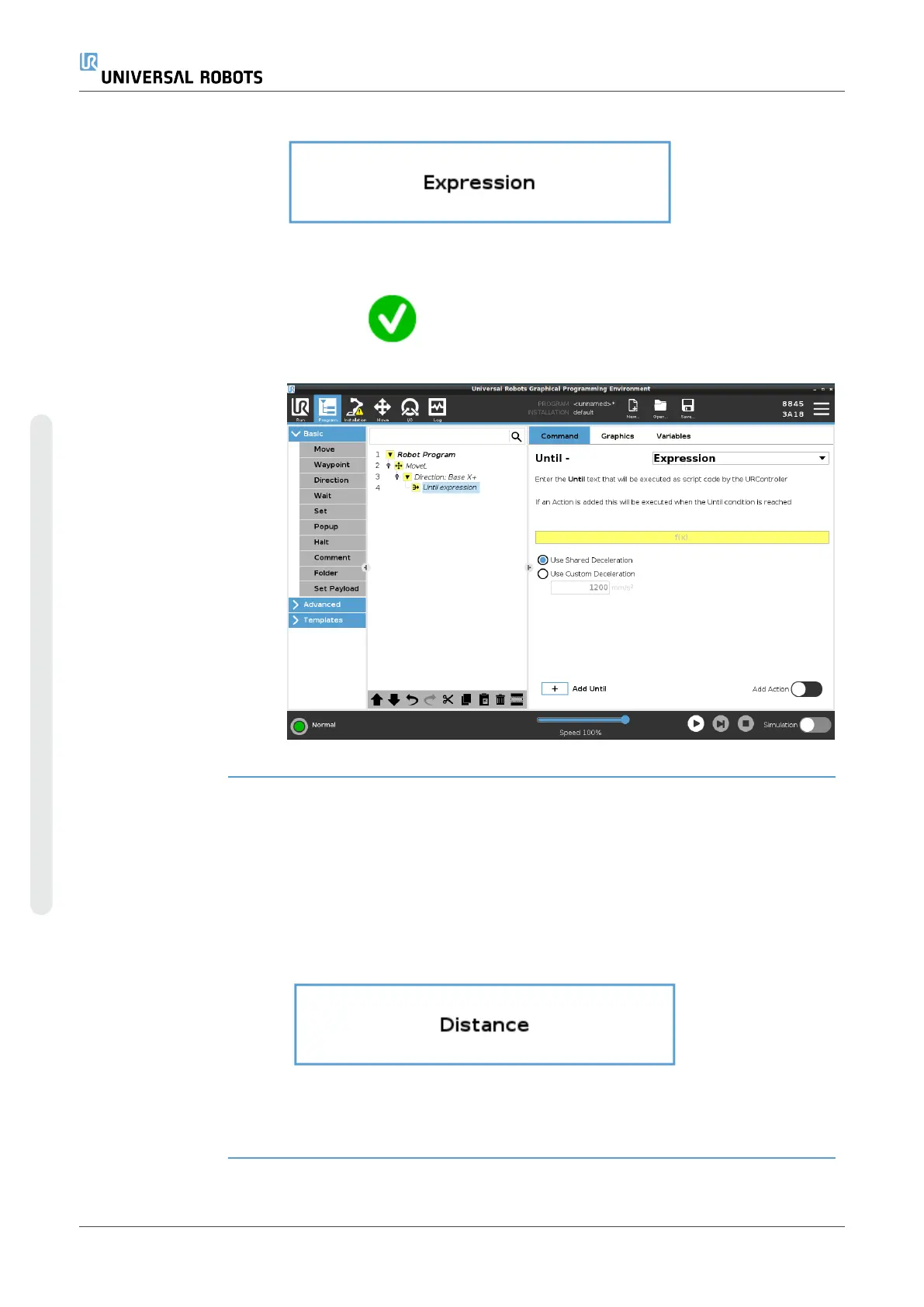
Add an Until
expression to a
robot program
1. When you have added the Until command, tap the
2. Tap the yellow expression field
3. Add the expression with the keyboard
4.
Tap Submit to save the expression
5. Choose if you want to use the shared deceleration or a custom deceleration
Distance This node stops a Direction move when the robot moves a certain distance. The
velocity is ramped down so the robot stops exactly at the specific distance.
You can also use a specific distance as a stop condition.
Example You can use the distance function to move the tool a specific distance before a full stop
such as moving the tool away from a work piece.
Add an Until
distance to a
robot program
1. When you have added the Until command, tap the
2. Add the distance in mm
3. Select to stop after it has moved the distance or blend with a radius. Click here
to read more about blending.
UR10e 218 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.