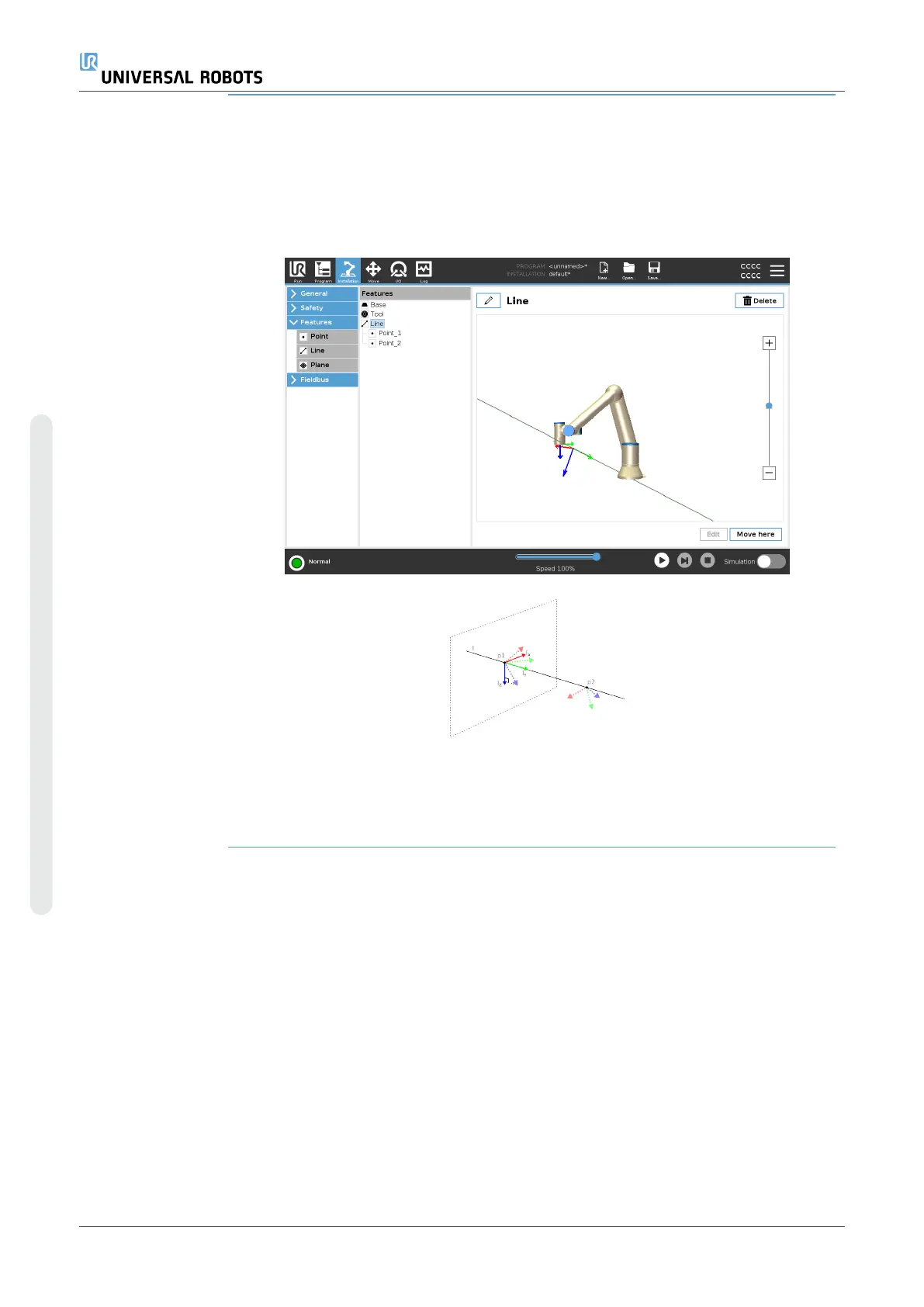
Line feature The line feature defines lines that the robot needs to follow. (e.g., when using conveyor
tracking). A line
l
is defined as an axis between two point features
p1
and
p2
as shown
in figure 20.13.
Adding a Line
1. In Installation, select Features.
2. Under Features select Line.
Here you can see the axis directed from the first point towards the second point,
constitutes the y-axis of the line coordinate system. The z-axis is defined by the
projection of the z-axis of
p1
onto the plane perpendicular to the line. The position of the
line coordinate system is the same as the position of
p1
.
Plane Feature Select the plane feature when you need a frame with high precision: e.g., when working
with a vision system or doing movements relative to a table.
Adding a plane
1. In Installation, select Features.
2. Under Features select Plane.
UR10e 302 User Manual
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.
 Loading...
Loading...











