If the speed of the servo motor exceeds the set value of P5-03, it is judged that the servo motor is rotating
and the output of the rotation detection (/TGON) signal.
Note: Rotation detection has a hysteresis of 10 rpm.
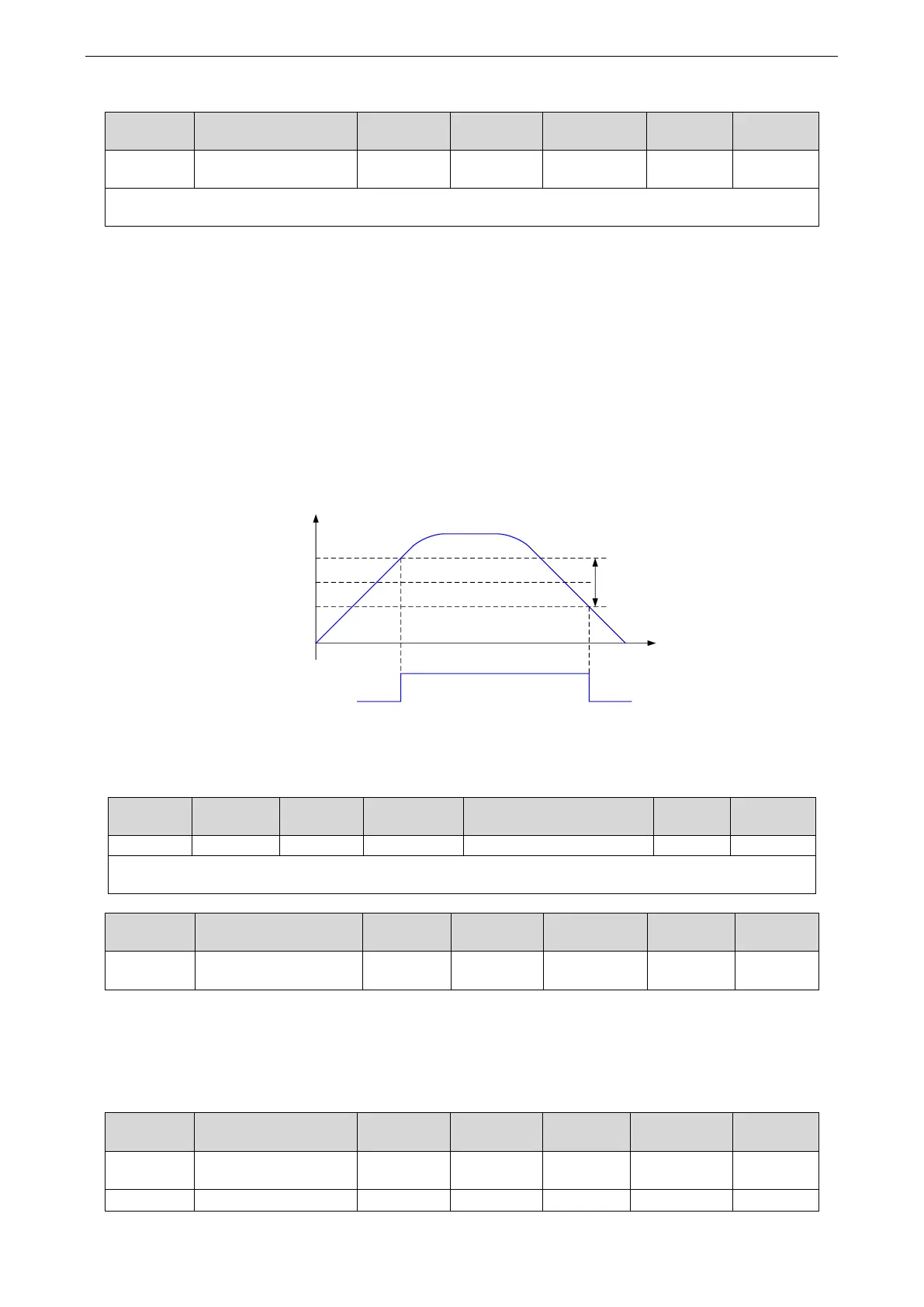
3. Hysteresis
Hysteresis is set up to prevent the system from repeatedly acting and oscillating when the parameters fluctuate up
and down in a certain value. Once the hysteresis value is set, there will be a fixed ring width. Then only when the
parameter must be greater than a certain value can the action be taken. When the parameter is smaller than another
value, the action will be released. The ring width determines the interval time of the action. The action of small
ring width is sensitive and frequent, and the action of large ring width is slow.
It should be noted that the rotation detection speed (P5-03), the same speed detection speed (P5-04), the arrival
detection speed (P5-05), all contain 10 rpm hysteresis. For example, the rotation detection speed P5-03 is set to 50,
and the rotation detection/TGON output port is SO3.
Defaulted is not distribute to the terminals. Range: 0000-0014. Distribute to output terminal through
P5-39. When it set to 0002, it means output from SO2.
There is default 10rpm hysteresis loop, please refer to chapter 5-12-3 for hysteresis loop.
4.8.5.4 Warn output (/WARN)
Set the alarm output threshold, when the current speed is higher than the warning speed, output / WARN.
 Loading...
Loading...

