wiring situation.
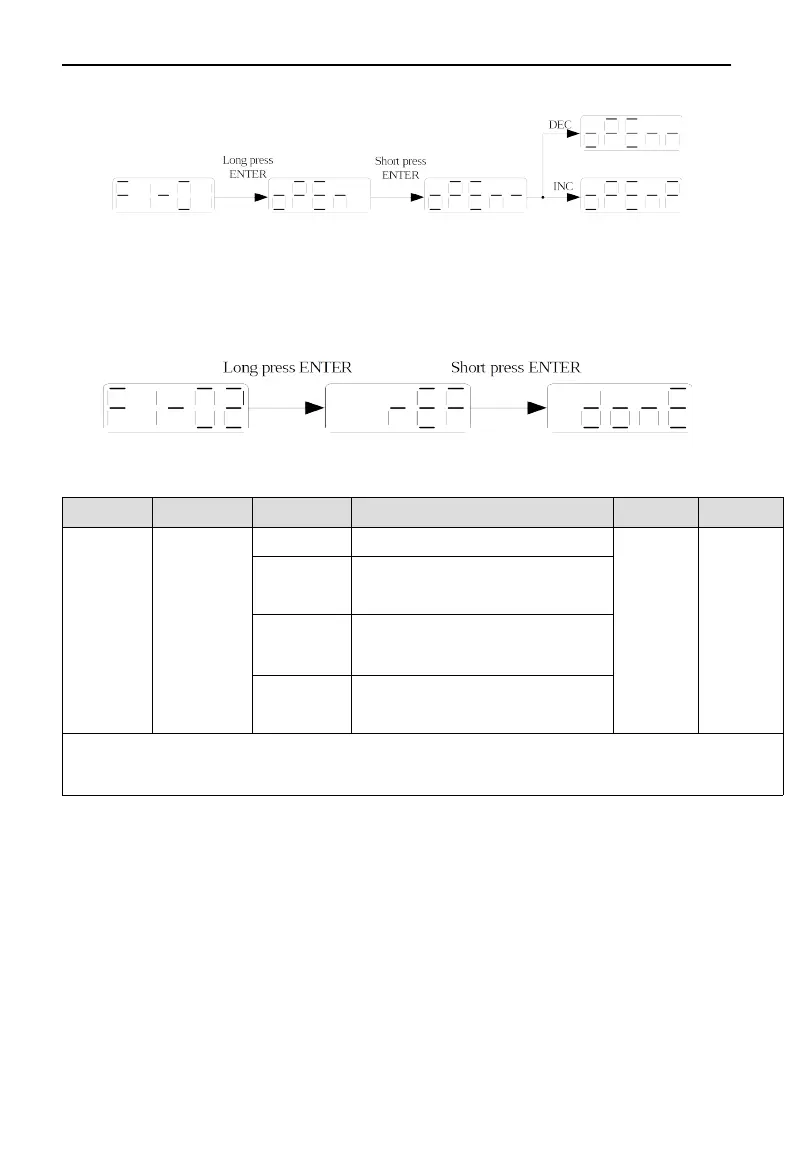
3. Current sampling zero-correction(F1-02)
When the servo driver is self-renewed or the motor runs unsteadily after a long time, the user is advised to use
the current sampling zero-correction function.
Press STA/ESC to exit, please power on again.
4. Software enable(F1-05)
Parameter Signal name Setting Meaning Change Effective
P0-03
Enable
mode
0 Not enable
Servo
OFF
At once
1 ( default
)
I/O enable /S-ON
2
Forced enable
(F1-05 or communication)
3 Fieldbus enable (the model which
supports motion bus)
F1-05 = 0: cancel enable, enter bb status.
F1-05 = 1: forced enable, servo is in RUN status.
Note:
(1) F1-05 = 1 (provided P0-03 = 2) bit software is forced to enable, and the forced enable will be invalid after
power on again.
(2) If the user wants to enable as soon as the power is on, and it still takes effect after power failure, P5-20 is
set to n.0010. (P0-03 = 1 effective)
5. clear the turns of absolute encoder(F1-06)
First turn the servo off, and then clear the number of turns of the absolute value encoder. The operation is as
follows:
53
 Loading...
Loading...

