V5 series inverter
61
AVR is auto voltage regulation.When the input voltage of inverter fluctuates, AVR function can keep it stable.
When decelerating stop, if AVR is disabled, the decelerate time is short and the running current is large; if AVR is enabled,
the motor will stable decelerate, the running current is small and the decelerate time is longer.
0: Disabled
1: Enabled
2: Disabled in Dec process
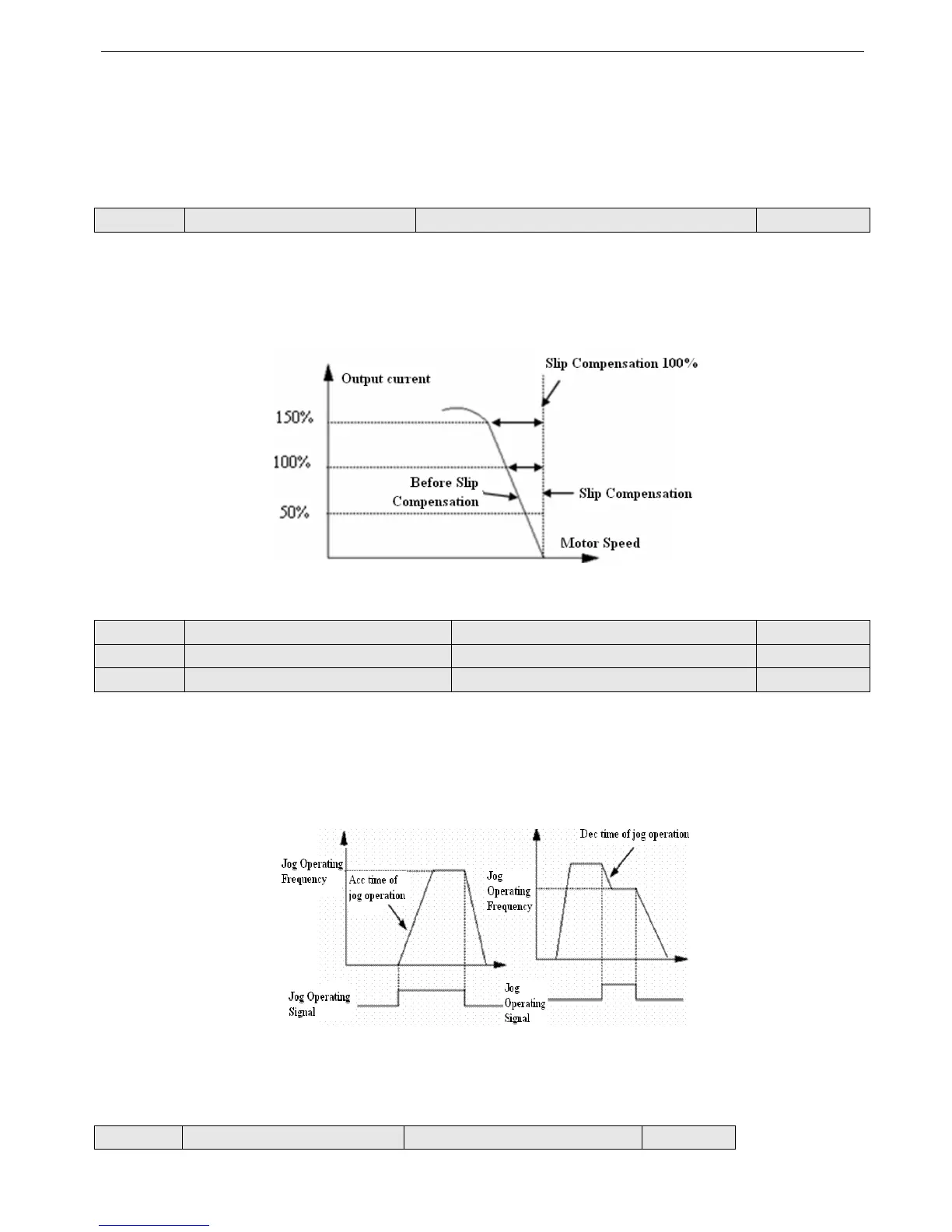
P3.05 slip frequency compensation Range: 0~150(%) 0(%)
This function can make suitable regulation for inverter’s output frequency according to the load changing, and control the
speed at a certain value by dynamic compensating the slip frequency of asynchronism motor. If auto-torque boost function
is used together, better low speed torque characteristic can be obtained. As shown in Fig.4-13.
Fig.4-13 Slip Compensation
P3.06 Jog operating frequency Range: 0.10~50.00Hz 5.00Hz
P3.07 Accerlate time of jog operation Range: 0.1~60.0s 5.0s
P3.08 Dec time of jog operation Range: 0.1~60.0s 5.0s
Jog operating frequency has the highest priority. No matter what status the inverter is, once there is a jog operating com-
mand input, the inverter will jog within Acc/Dec time of jog operation, as shown in Fig.4-14.
Acc time of jog operation means the time accelerate from 0 Hz to max frequency, Dec time of jog operation means the
time decelerate from max frequency to 0 Hz.
Fig 4-14 Jog operation
Note: (1) Jog operation can be controlled by panel, terminal and serial port.
(2) If jog operation command has been canceled, the inverter will decelerate and stop.
P3.09 Communication configuration Range: 000~155 054
You can change baud rate, digital format and communication mode by setting the lowest bit, ten bit, and hundred bit of