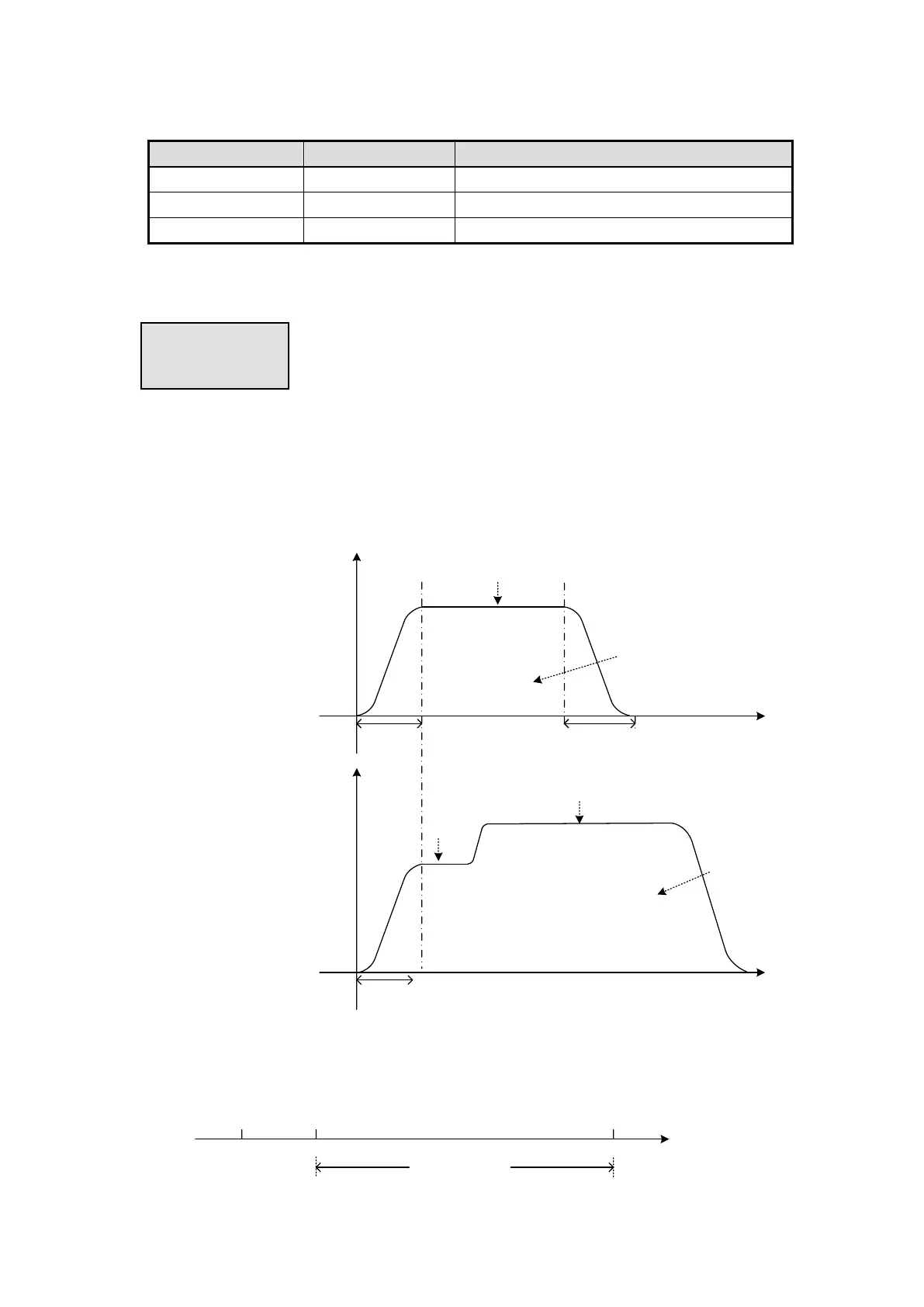
The motor present position is 2000, it needs to use MOTO to run 10000 pulses with the speed
5000Hz. It will change the speed to 6000Hz, and target position 20000 pulses when the motor is
running. The acceleration and deceleration time is 50ms.
◆incremental position mode
t
t
v
v
Speed S1
Acc time S2
Target position S0
Dec time
Acc time S2
Speed S1
Modified speed
Modified absolute
position
0
0
Not change the target
position and speed
Change the target
position and speed
◆incremental position mode, motor running distance
0
Start position
2000
10000
Incremental position
8000
Present
position/Pulse number
Target position
ON: the pulse is outputting
 Loading...
Loading...