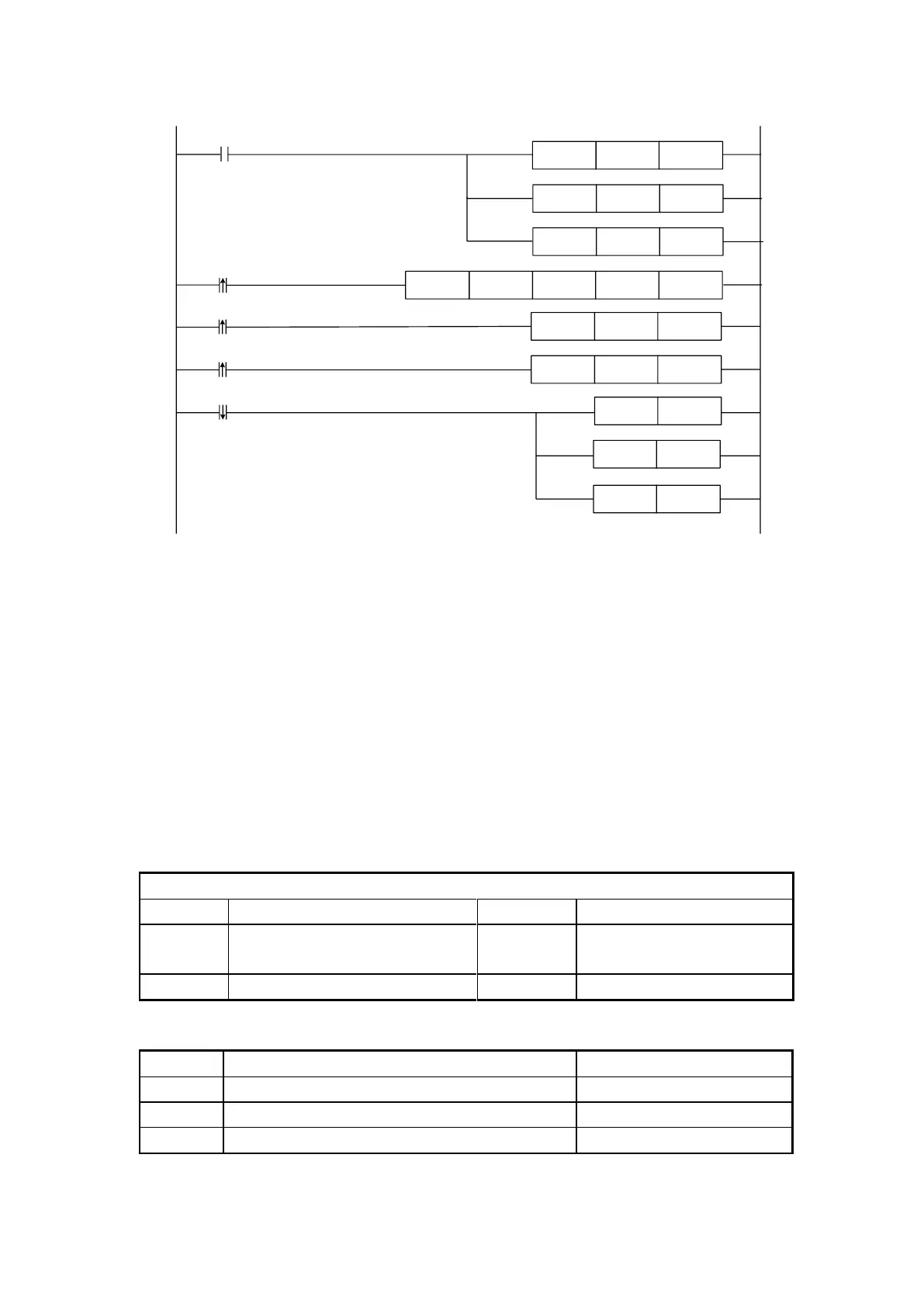
SM2
DMOV K10000 HD0
DMOV K5000 HD2
DMOV K50 HD4
HD0 HD2 HD4MOTOA K1
M0
DMOV K20000 SD2030
DMOV K6000 SD2032
M1
M2
SM2001
RST M0
RST M1
RST M2
SM2 is initial ON coil, it sends the pulse numbers, speed and acceleration, deceleration time in the
related registers.
Servo drive is enable, M0 is from OFF to ON, it run the absolute position instruction MOTOA.
M1 is from OFF to ON, it sends the absolute target position in the related register,
M2 is from OFF to ON, it sends the new speed in the related register.
The running flag SM2001 reset after the pulse sending completed, related coil reset.
2-2-3.Multi-speed running [MOTOS]
1. Instruction summrize
This instruction cannot change the target position when running, but it can change the present
speed.
Multi-speed running [MOTOS]
2. Operand
Parameter starting address
 Loading...
Loading...