or max position limit is effective
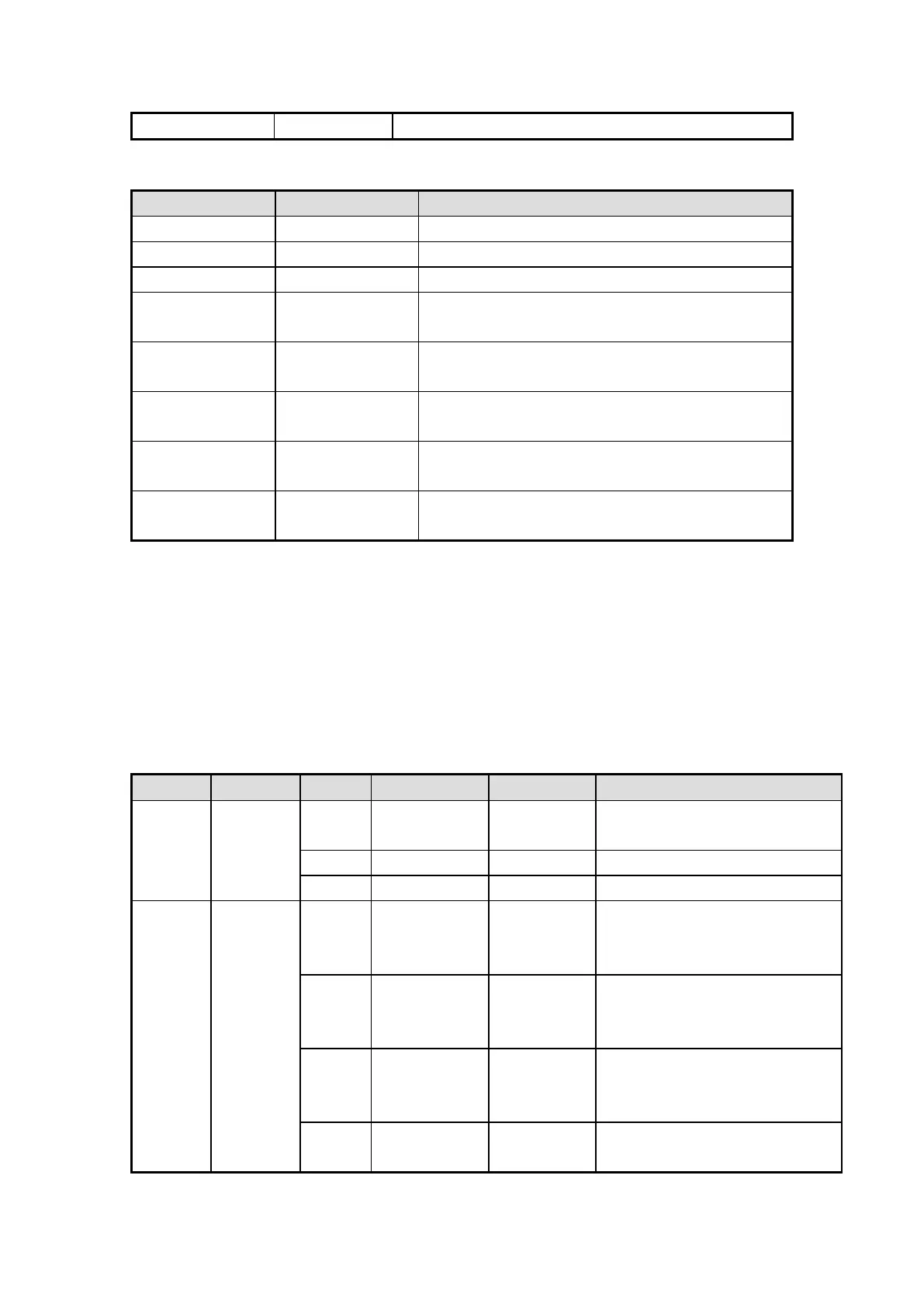
Table 4-6: control bit parameters (N=1~20)
ON: servo enable; OFF: servo disable
System will automatical reset after enable
System will automatical reset after enable
System will automatical reset after enable
System will automatical reset after enable
System will automatical reset after enable
System will automatical reset after enable
After enable, when the servo is not connected to the
system, simulation run, cannot switch when running.
5 Error message
The following table shows the error details and solutions.
Check the wiring between servo
and PLC
Max soft
position limit
overrange
Reverse jogging to go out the
overrange area, clear the alarm
flag and code by manual
Min soft
position limit
overrange
Reverse jogging to go out the
overrange area, clear the alarm
flag and code by manual
Max electrical
position limit
overrange
Reverse jogging to go out the
overrange area, clear the alarm
flag and code by manual
Min electrical
position limit
Reverse jogging to go out the
overrange area, clear the alarm
 Loading...
Loading...