3-3.Jogging
X-NET filedbus has jogging function.
Set the pulses of jog for one time in register (SD2040+60*(N-1)), set the jogging speed in register
(SD2042+60*(N-1)). The forward jogging is triggered by the coil (SM2011+20*(N-1)), the
reverse jogging is triggered by the coil (SM2012+20*(N-1)).
The jogging signal SM2011+60*(N-1), SM2012+60*(N-1) will be reset immediately after set on.
If it needs to keep on jogging, user must make program in HMI or PLC to set on the signal in
100ms, the motion axis will accelerate to jog speed and constant speed run.
Continuous jogging: Set the target position to the larger number in the range of target limit value
through MOTO instruction.
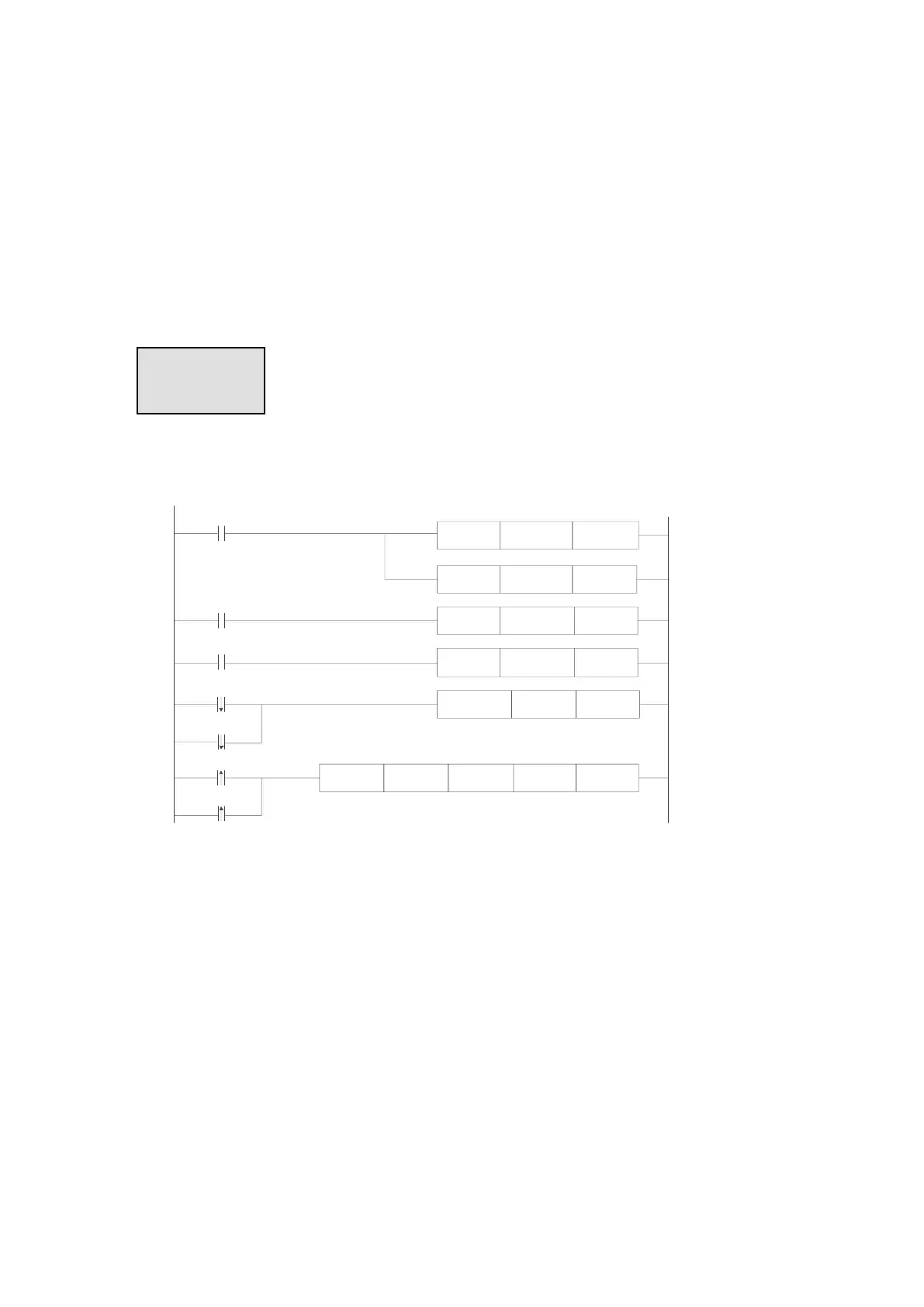
MOSTOP K-1 K1
HD0 HD2 HD4MOTO K1
M0
DMOV K200000 HD0
DMOV K6000 HD2
SM2
M0
DMOV K50 HD4
M0
DMOV K-200000 HD0
M1
M1
M1
Note:
SM2: store the value in related register when the PLC starts to run
M0: forward jogging button. Press M0 to make the motor run forward. When M0 is reset, the
motor stop at once.
M1: reverse jogging button. Press M0 to make the motor run reverse. When M0 is reset, the motor
stop at once.
 Loading...
Loading...