TECHNICAL NOTE
MOTION APPLICATION ENGINEERING GROUP
Yaskawa Electric America - 2121 Norman Drive South – Waukegan IL 60085
(800) YASKAWA - Fax (847) 887-7280
11/23/2005 25 of 25 eng/05.055/MCD
Disadvantages
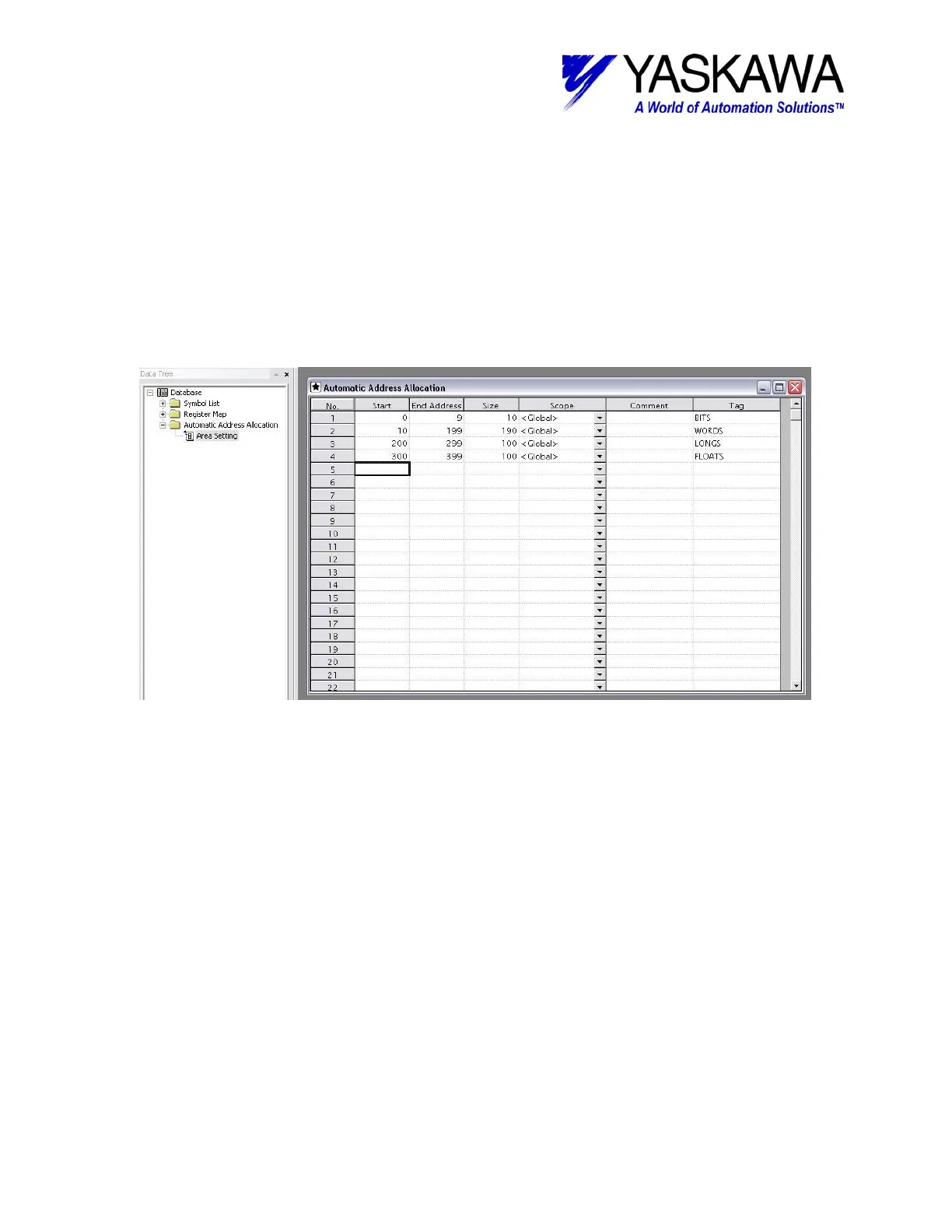
Automatic Address Allocation will not always start registers to be reserved for long and float data
types on even numbered addresses (as recommended by the MP best practices). A solution is
available to this problem as blocks of memory can be assigned within the auto-allocation function
to certain data types. A block of addresses (as shown below), starting at MW0200, is to be
reserved only for long data types. Since each long requires two registers, each long will start on
an even number address.
i.e. MW0000 thru MW0009 – bit data types
MW0010 thru MW0199 – word data types
MW0200 thru MW0299 – long data types
MW0300 thru MW0400 – float data types